0%
0%
Radar Sensor
This project will be using an InnoSent IPM 165C and / or IVS 362 module to sense distance and motion towards / away from the observer.
 Capt. Flatus O'Flaherty ☠
Capt. Flatus O'Flaherty ☠Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
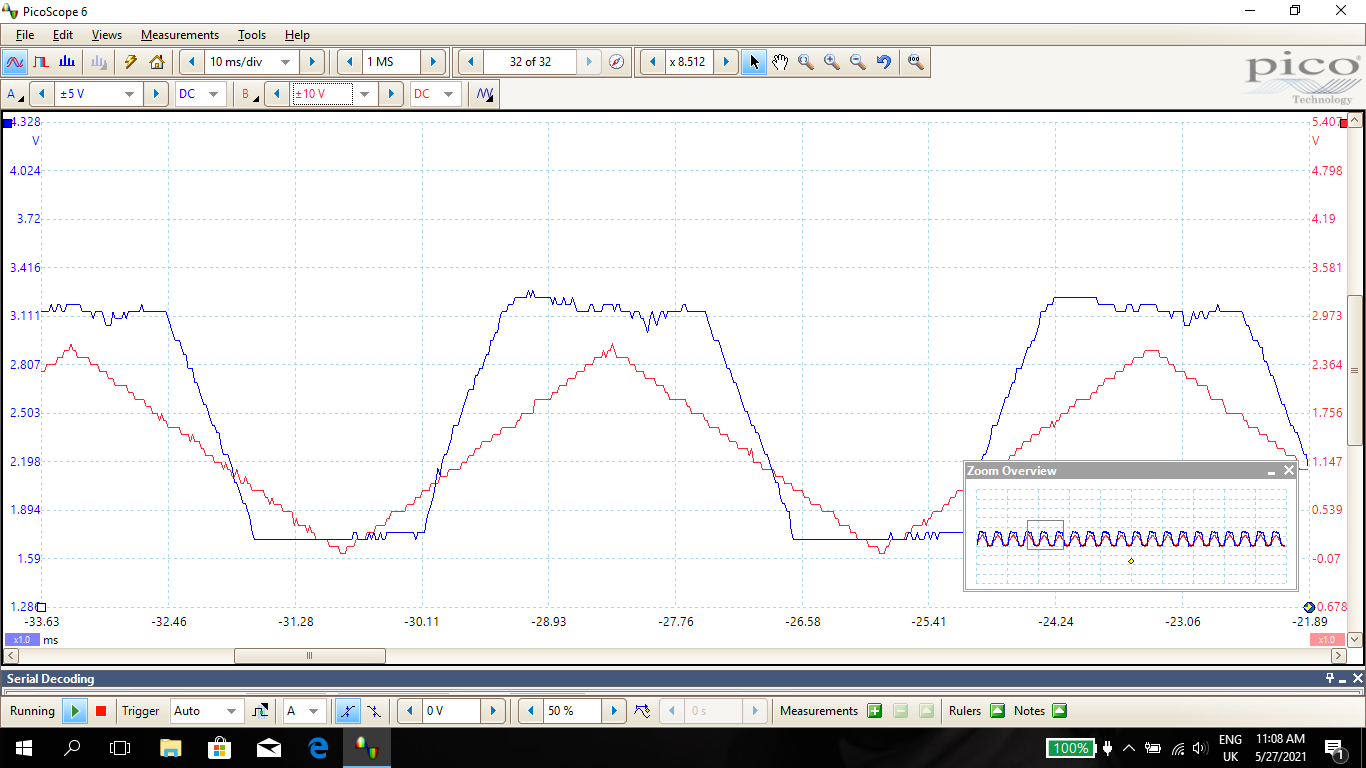
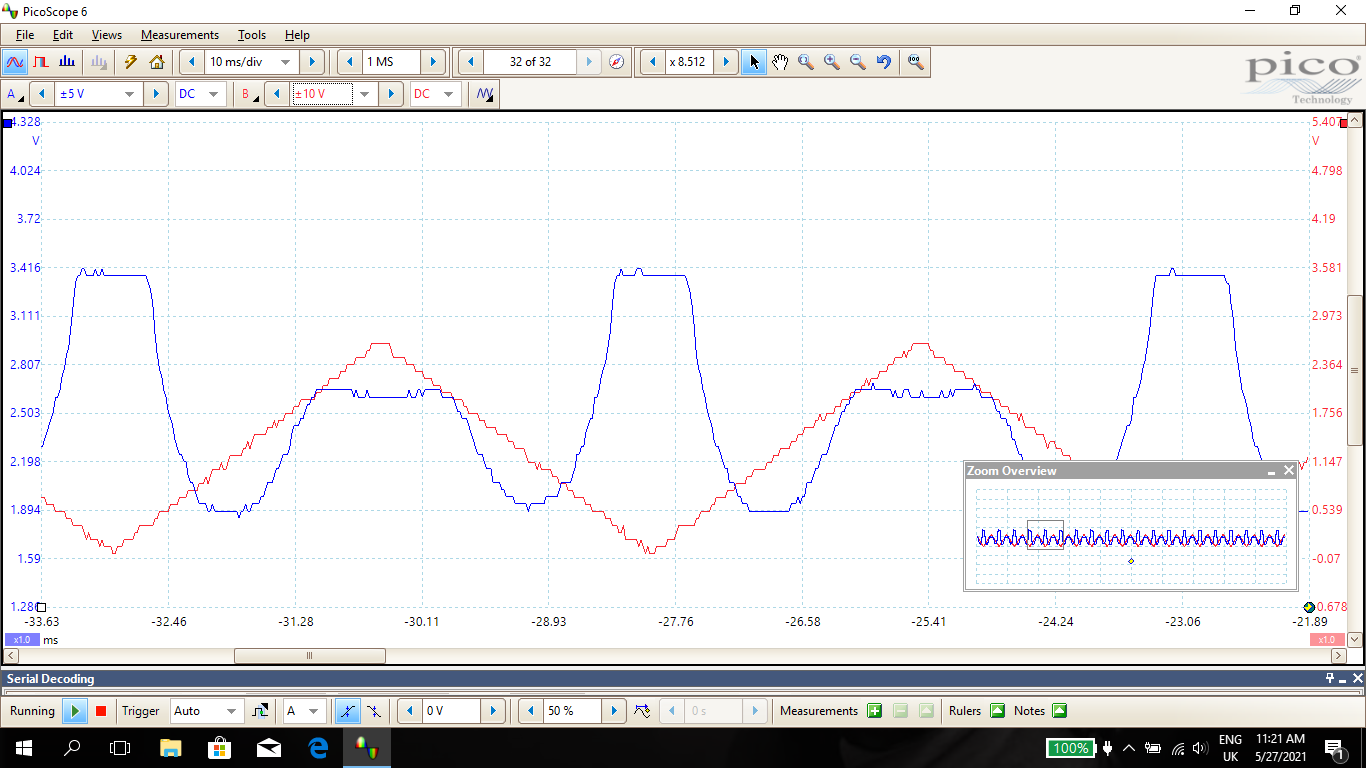
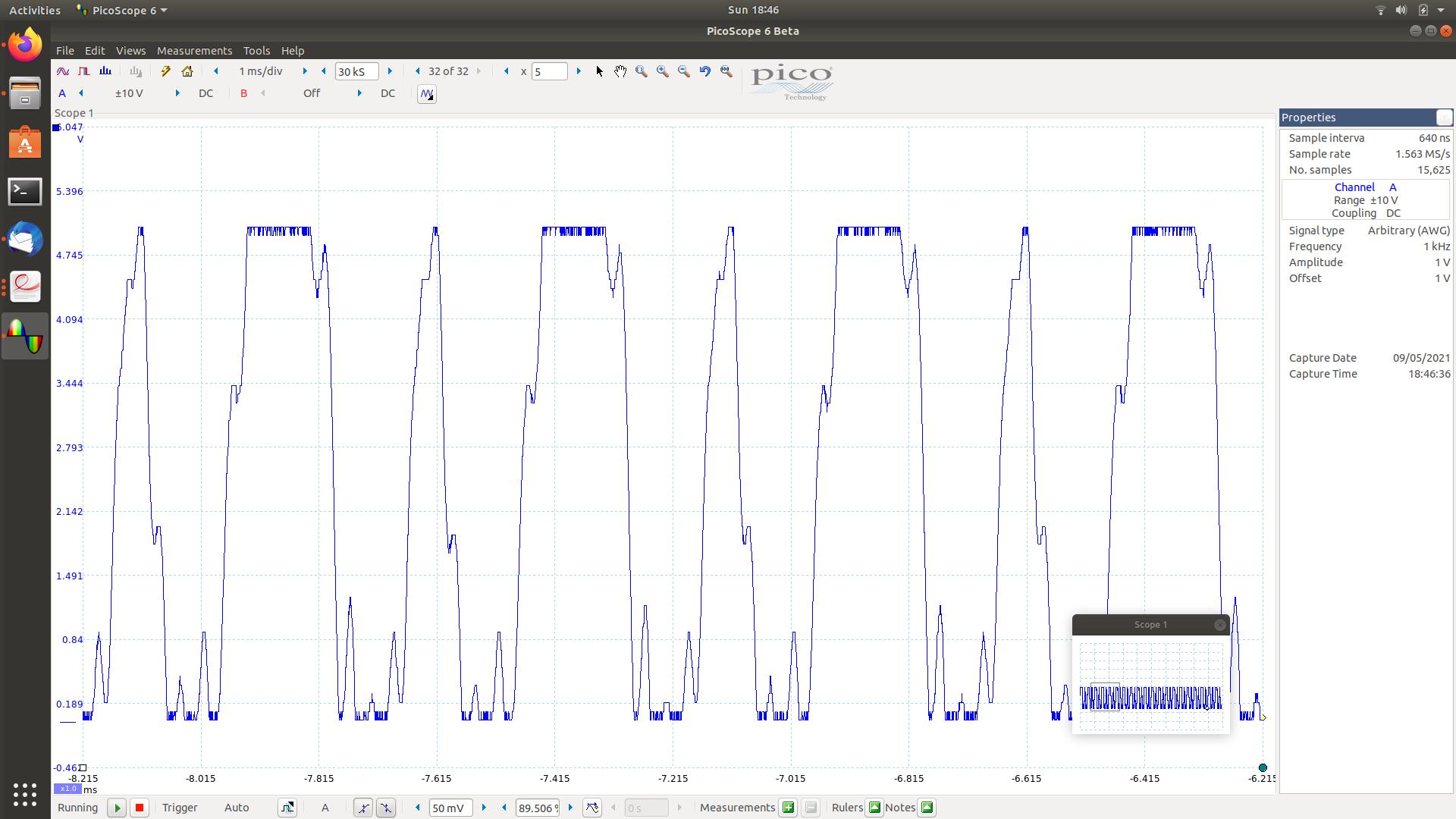
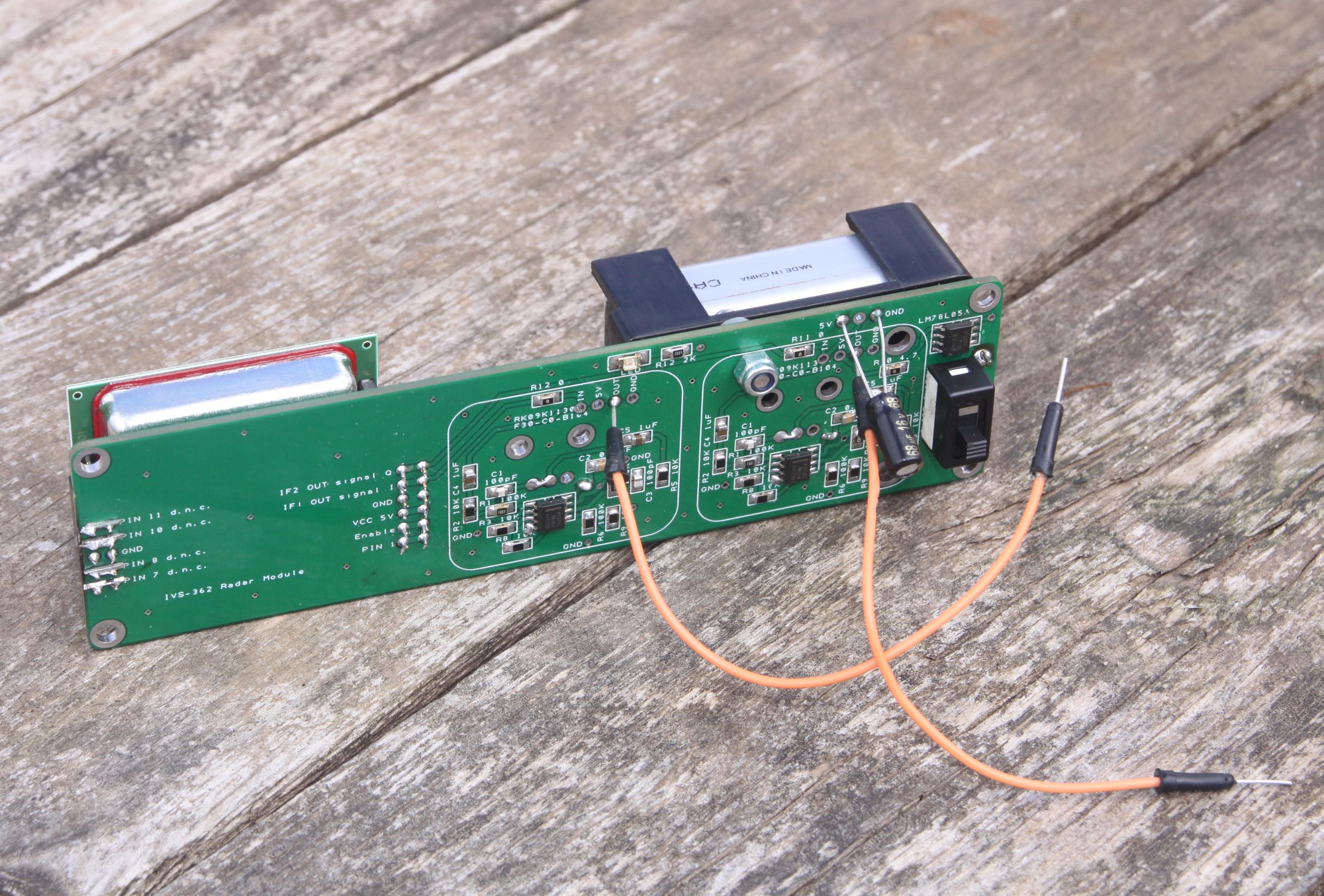
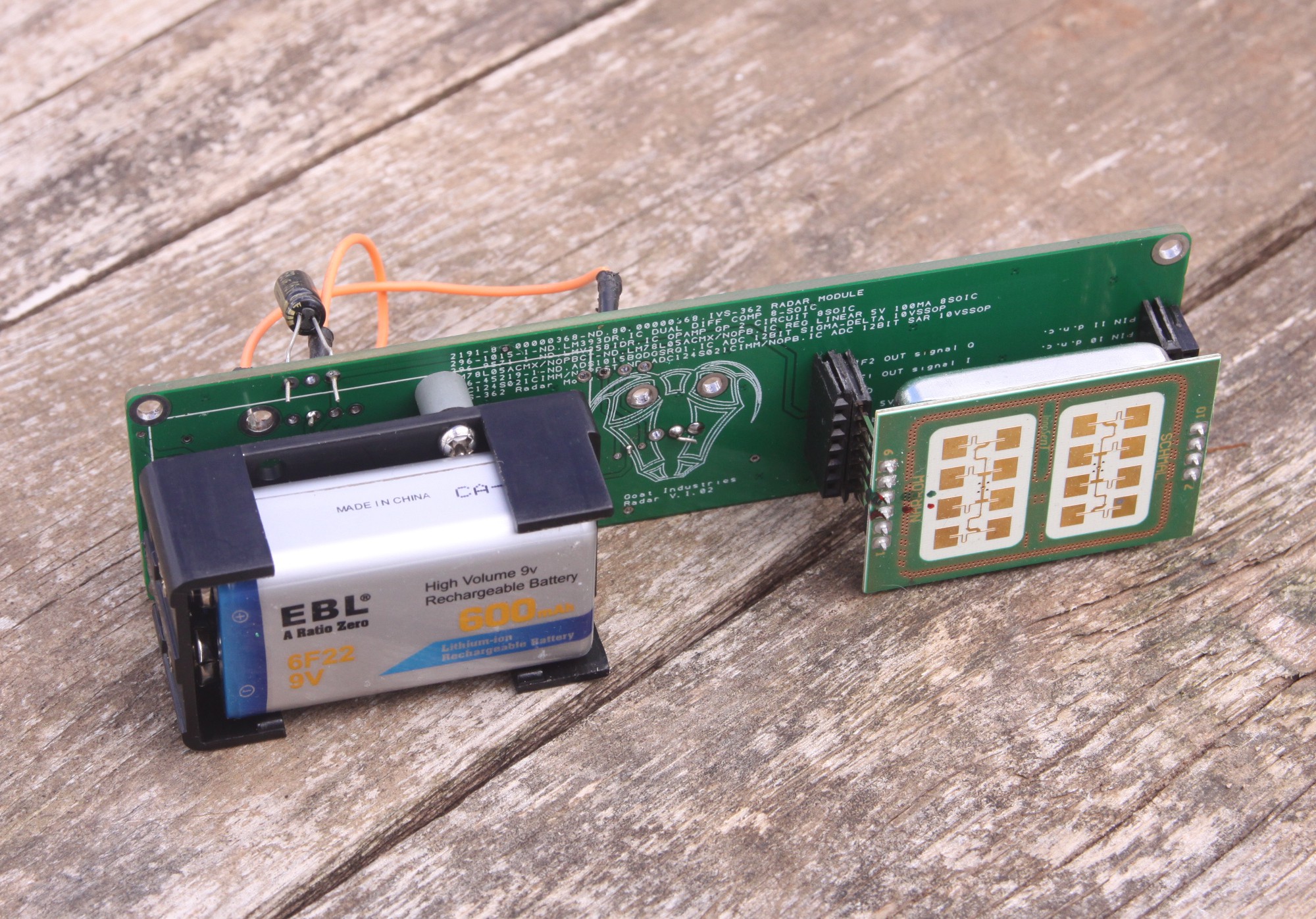
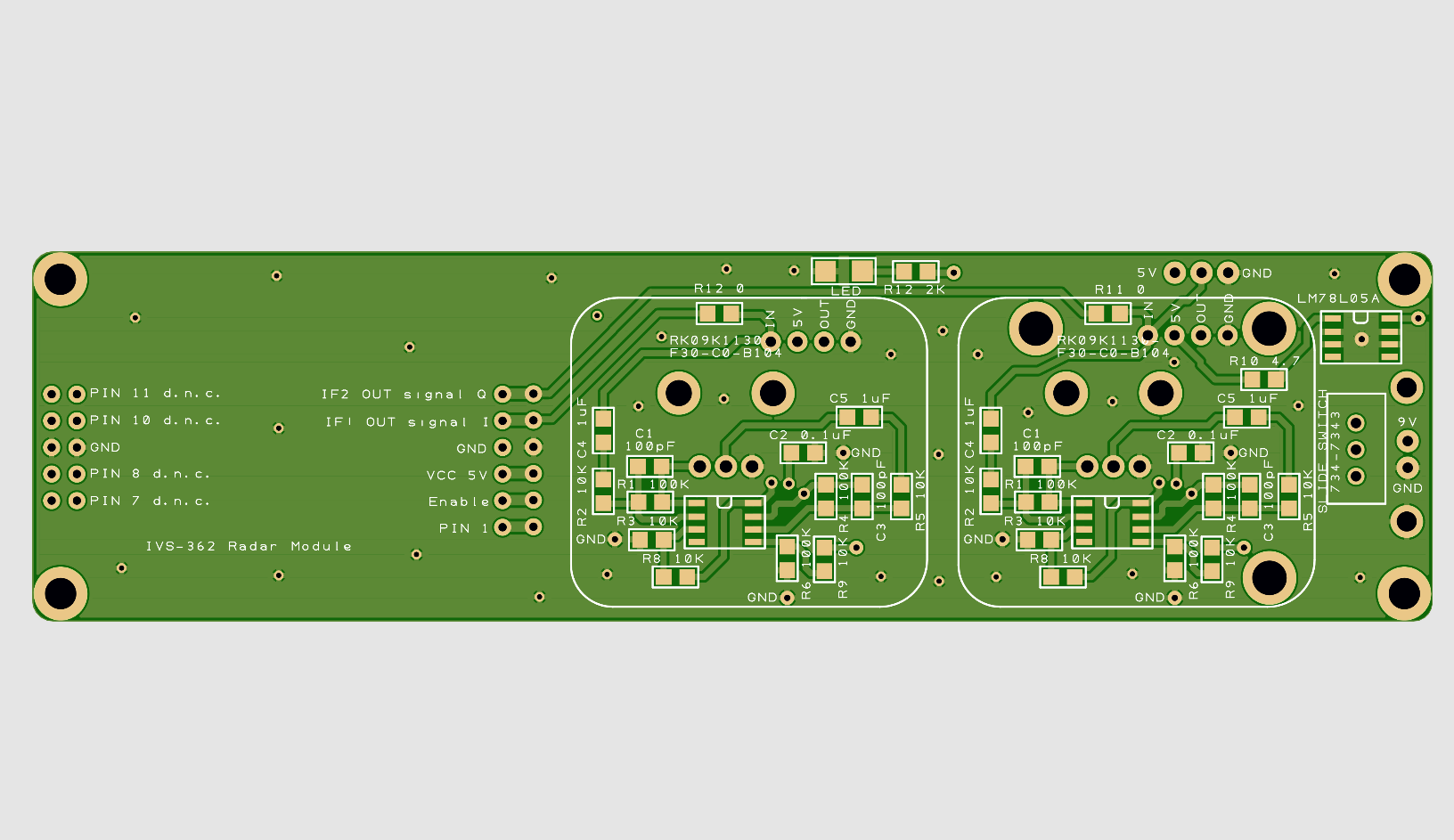 Featuring mounts for the IVS 362 and the IPM 165C, with op amp circuits in the big white boxes with rounded corners. The IPM 165C has already been tested with oscilloscope and just needs the signal amplified for presentation to the ADC.The circuit schematic for the op amps is as below:
Featuring mounts for the IVS 362 and the IPM 165C, with op amp circuits in the big white boxes with rounded corners. The IPM 165C has already been tested with oscilloscope and just needs the signal amplified for presentation to the ADC.The circuit schematic for the op amps is as below: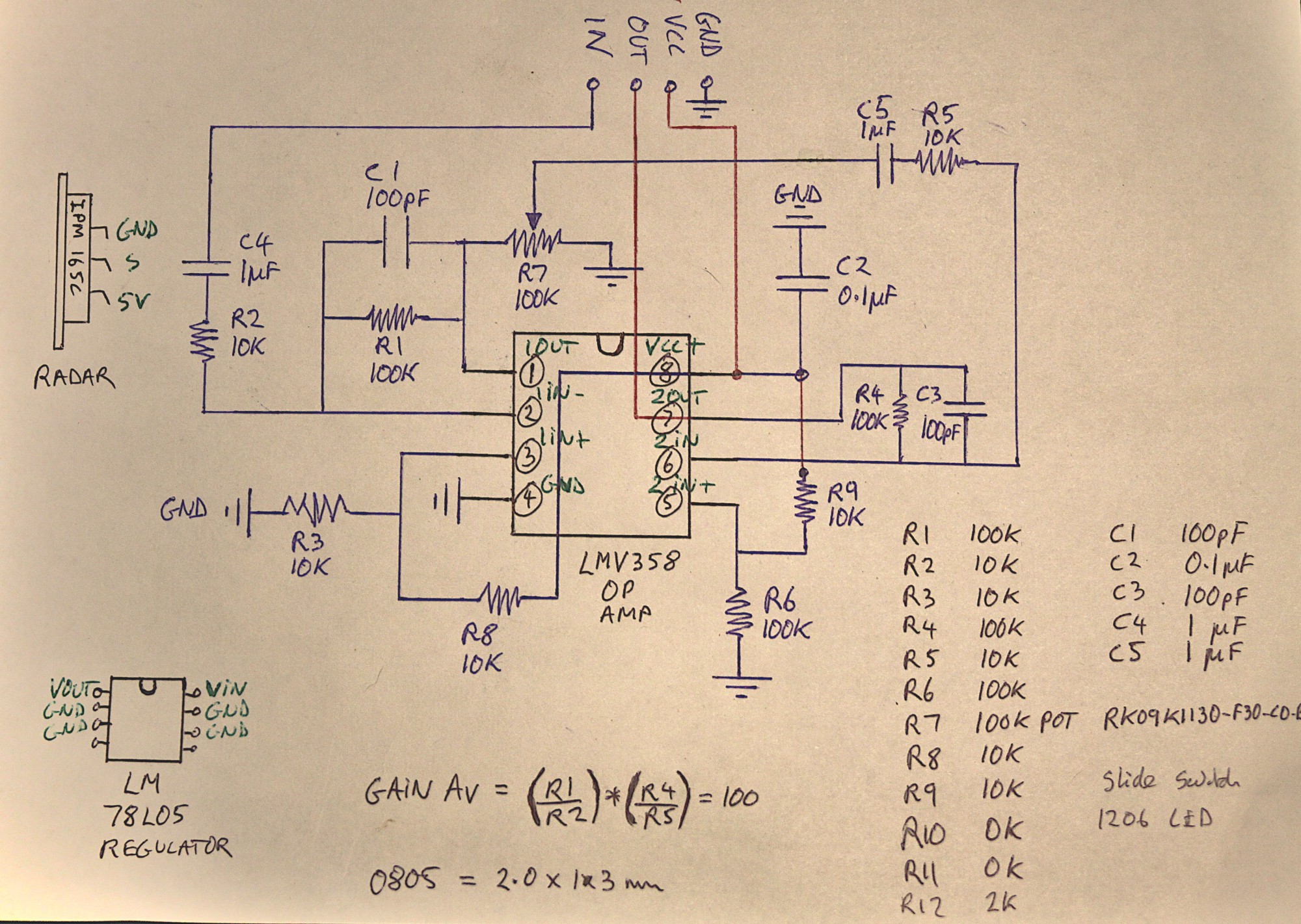

 Grant Giesbrecht
Grant Giesbrecht
 Kuldeep Singh Dhaka
Kuldeep Singh Dhaka