0%
0%
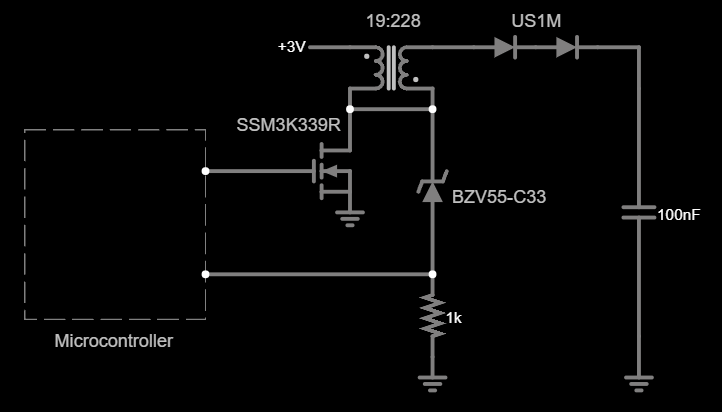
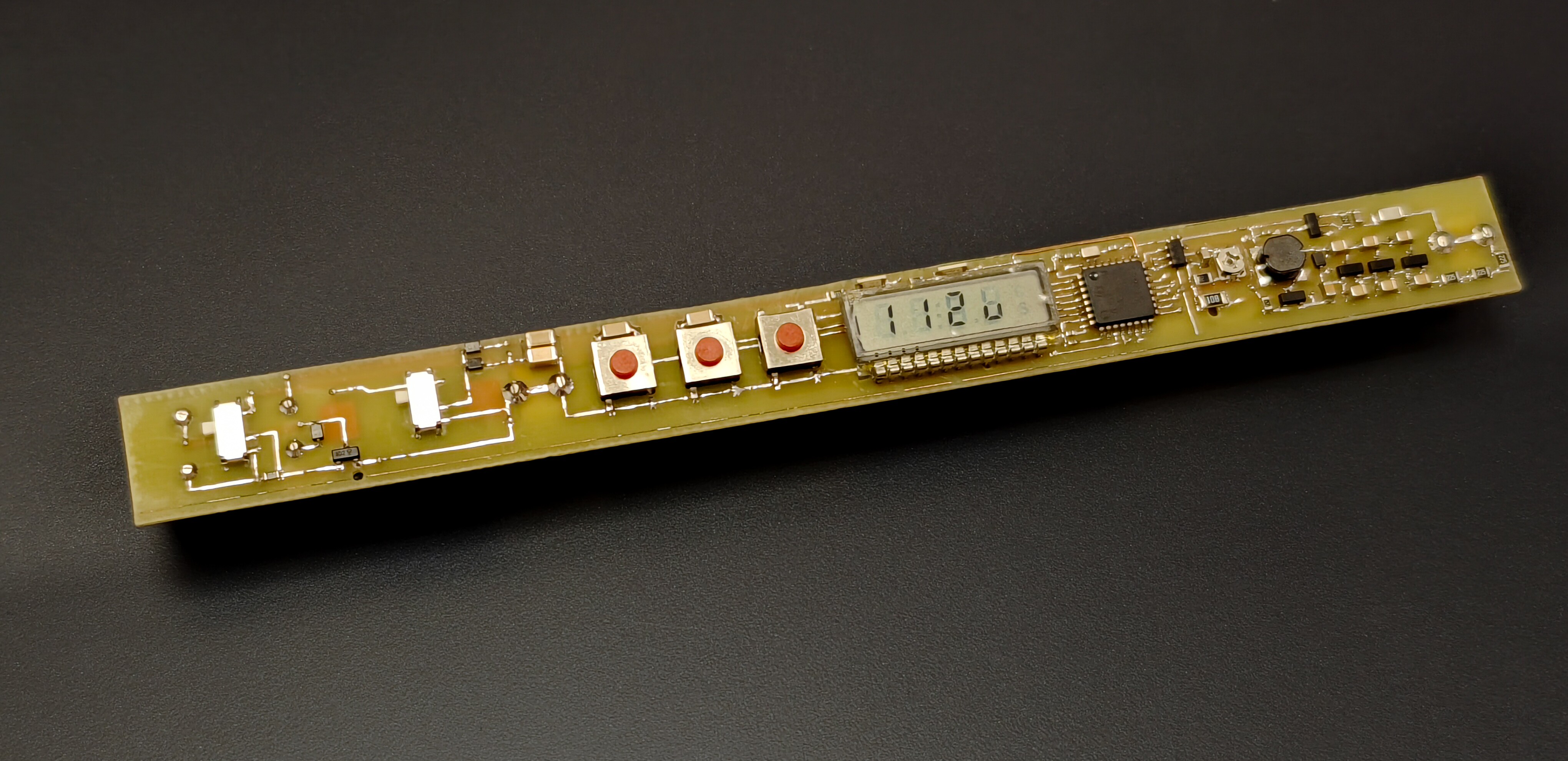
Compact, low-power Geiger counter
A marker pen sized Geiger counter with up to 12 months battery life from 2xLR44, based on STM8L152K4 microcontroller
 BleakyTex
BleakyTexBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests









 jaromir.sukuba
jaromir.sukuba
 Paul Andrews
Paul Andrews
 Radu Motisan
Radu Motisan
 James Wilson
James Wilson
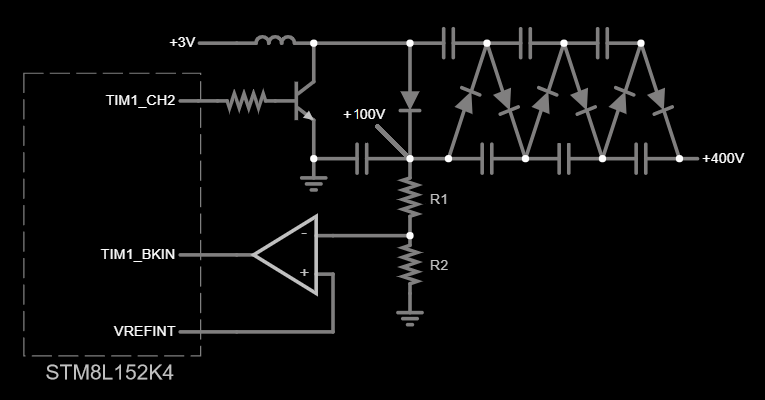
Congrats for the super impressive project! I love your detailed logs -- so much so that I shamelessly stole your previous boost design for half of my SiPM bias generator. Thanks!