Krzysztof Pochwała
Krzysztof Pochwała-
New firmware using Dev Containers
04/30/2023 at 18:52 • 0 commentsI've started work on porting current firmware to the ESP32-S3 (up to this time, we've used ESP32 development board for proof of concept, hence the name of the main repo - POC). To make the development as simple as possible, VSCode dev containers are used. You only have to have docker and vscode installed to start tinkering with firmware. After porting of the firmware, the same route will be taken on the host side stack - to avoid the need of running Ubuntu with installed ros natively. The repository is available here: kabot-s3-firmware. All input very welcome. I'm currently running it only on Linux, quickly checked on Windows, but other *nix systems should be also working (don't know about Macs running Apple Silicon, so if anybody has a chance of testing it, I'd be grateful - hit me up here or/and open github issue).
-
Hardware assembly
04/25/2023 at 01:39 • 0 commentsYou can now find assembly instructions here on hackaday, also README has been expanded to provide information about ROS stack startup: https://github.com/kabot-io/POC
-
Virtual BOM and PCB production files available
04/24/2023 at 23:33 • 0 commentsProduction files - Gerber files, pick and place files are available on the github repository: https://github.com/kabot-io/POC/tree/main/hardware/kicad/main/production
![]()
Screenshot from jlcpcb.
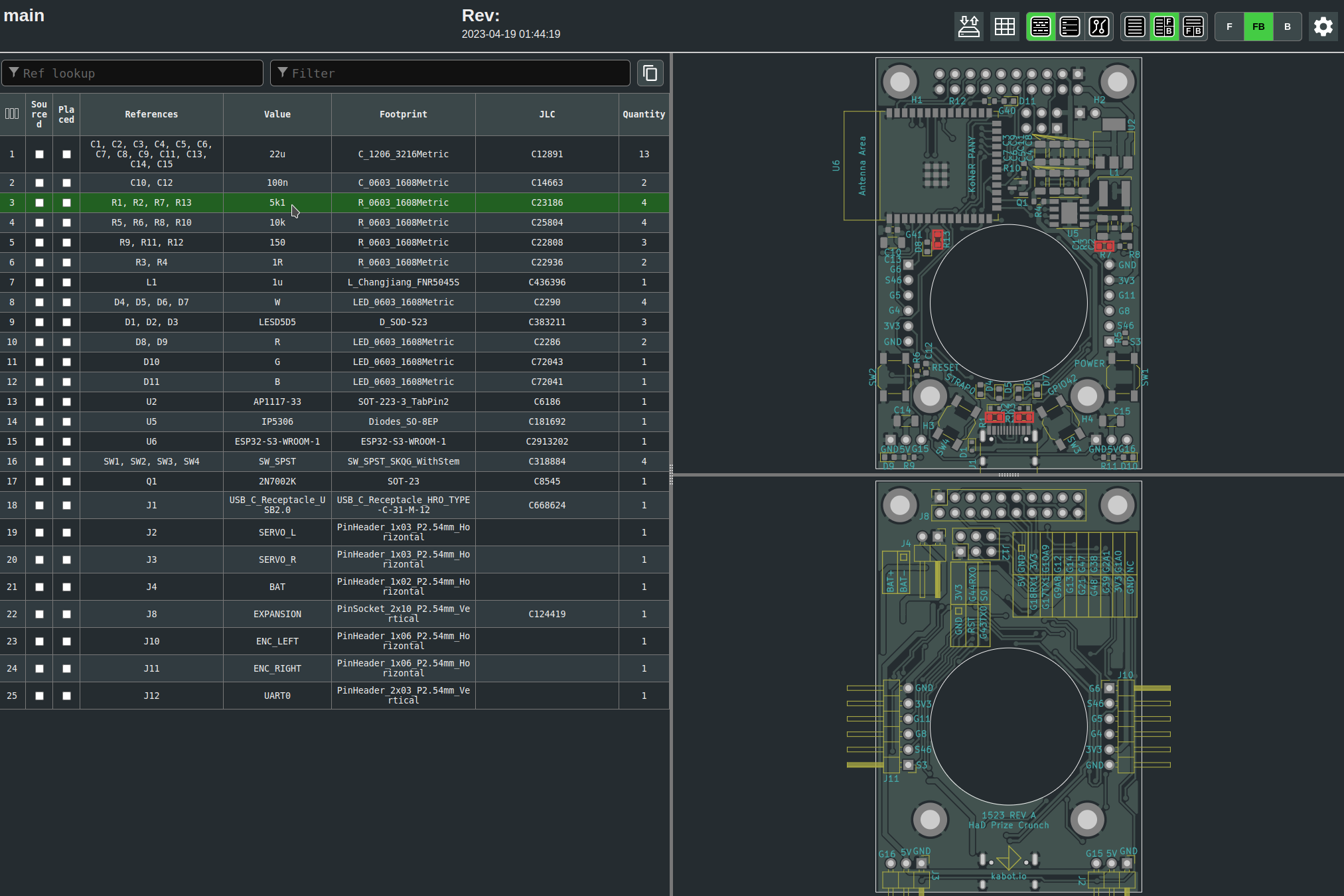
Also, on github pages alive is virtual BOM: https://kabot-io.github.io/POC/
![]()
Licenses also have been added - hardware is licensed as CC BY-NC-SA, and code is available under Apache 2 license, similar to ROS and micro-ROS packages.
Software: https://github.com/kabot-io/POC/blob/main/src/LICENSE
Hardware: https://github.com/kabot-io/POC/blob/main/hardware/LICENSE
Kabot - lowering entry barrier to ROS2
Ultra low cost expendable platform connected to Robot Operating System 2, powered by micro-ROS