Robert Wallhead
Robert Wallhead-
Base updates
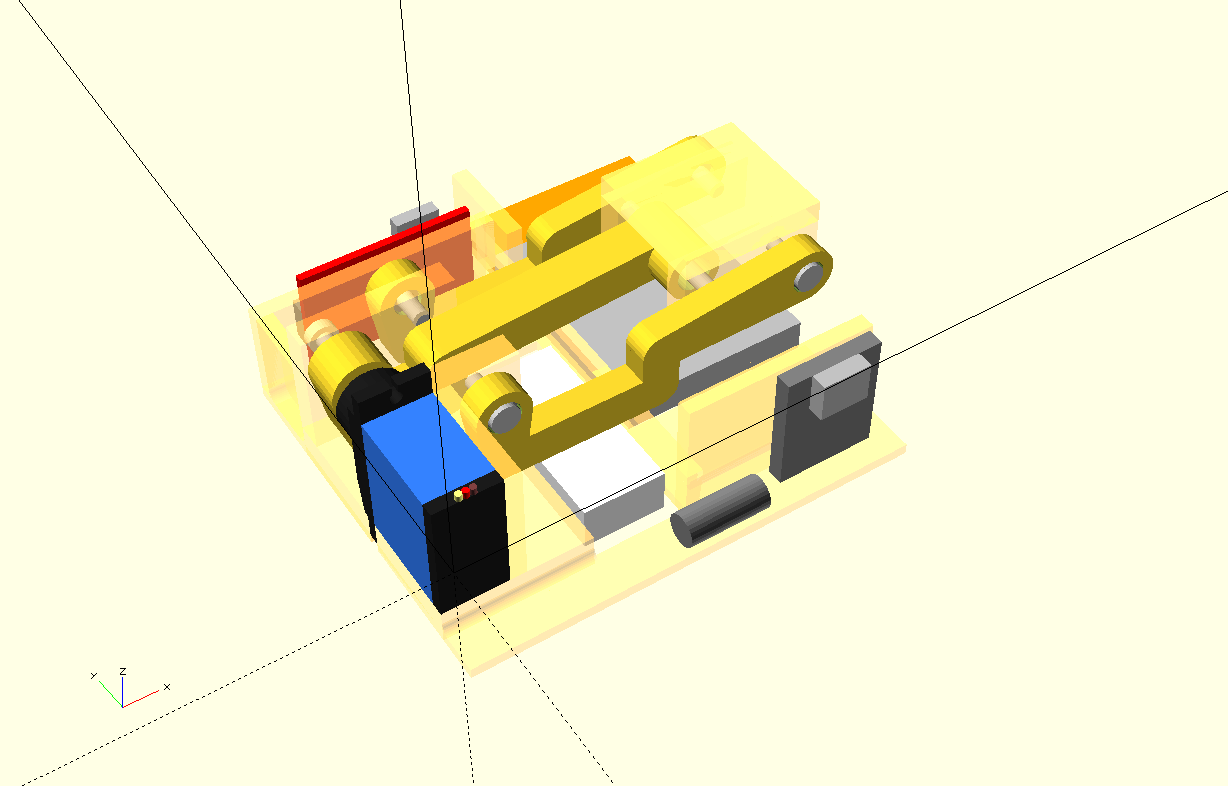
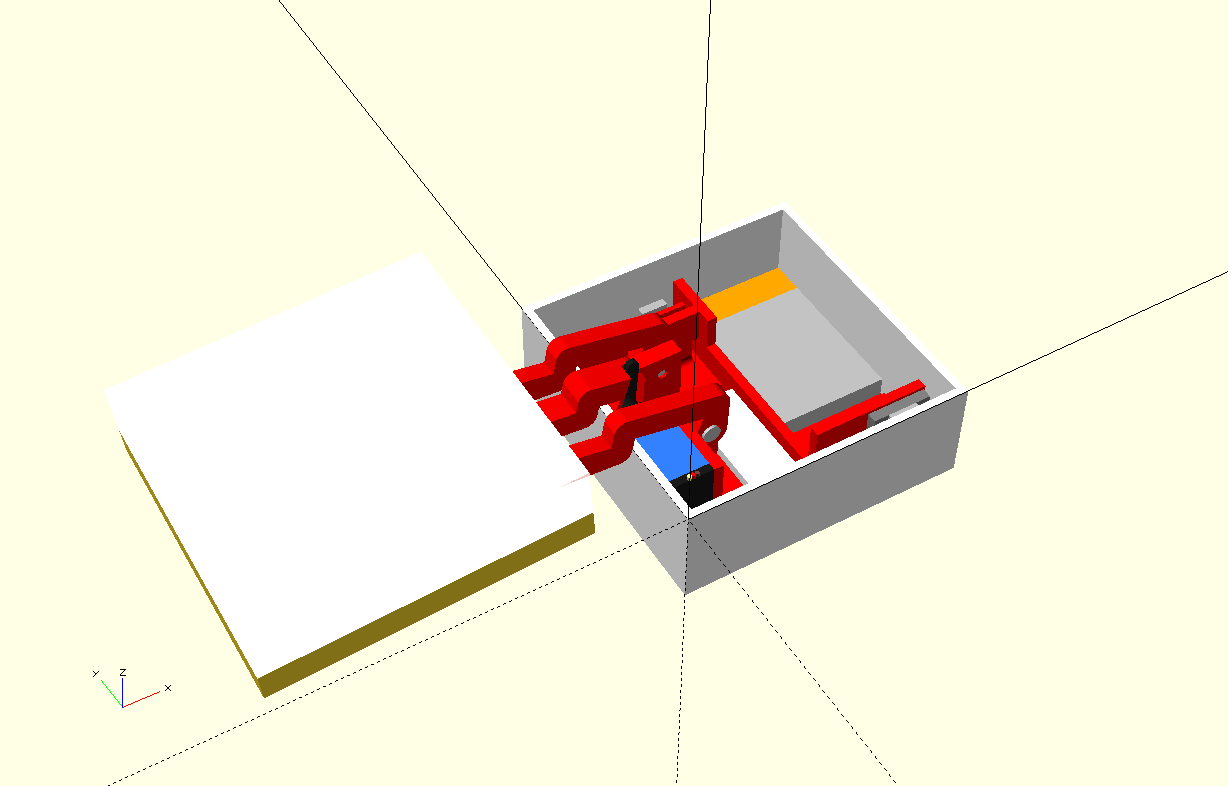
8 hours ago • 0 commentsHere's a couple of pictures of the updated mechanism base, with places for all the components, routing for the wiring and some protections for the battery:
![]()
![]()
-
Progress on v2, demo of v1
7 days ago • 0 commentsI've just put together the following demo of v1 in action:
And v2's mechanism works pretty well on the first print!
-
Finishing V1
04/27/2024 at 23:21 • 0 commentsVersion 1 is complete! Even though I identified a number of shortfalls with this first iteration, I wanted to complete the build of this one as a standalone unit. Everything fits, which is great, though I'd like version 2 to have places for each component and something to assist with wire routing. Here's the finished interior:
![]()
And here's a video of the motion:
-
WIP on v2 3D-printable linkage
04/14/2024 at 05:48 • 0 commentsI've uploaded a pic to the gallery showing the WIP design for the v2 3D-printable linkage
https://hackaday.io/project/195612/gallery#0a8cbaf96fff1d865aca99bf6c741148
-
Work to date
04/14/2024 at 01:09 • 0 commentsAs this has progressed enough to at least be functional, I've decided to publish it. The videos and pictures here are of my "V1" of the project. I only need to install the battery and charging circuit to consider this version complete.
Testing has shown this can generate 150-170g of pressure at full reach, which is reasonable as the cheap 9g servo I'm using is supposed to generate 1.8kg/cm of torque, and the distance between the servo's pivot and where it was pressing on the scales is about 10cm. The problem is that REX buttons are specified as taking anywhere between 200g and 1.5kg (expressed as approximately 2-15N) of pressure to trigger, though the one's I've observed have all been at the lower end.
V2 then really has to target 300g/3N to be considered worthwhile, which will require a servo that's more than twice as powerful. I'm considering this one as a candidate: https://core-electronics.com.au/micro-servo-high-powered-high-torque-metal-gear.html with an estimated 3.2kg/cm at the 5V I'll be working at.
Additionally, V2 will be built using a 3D-printed 4-bar linkage so that this project is repeatable, and all the files and code will be published at that point.
Covert REX trigger
Request-to-exit trigger disguised as an emergency door release