-
September Snapshot
09/21/2015 at 05:09 • 0 commentsThe road so far:
We've got a very stable HW/SW prototype! (check the github for the latest files).
Pathfinder has been validated in a bunch of different situations (outdoors, public environments, around complex furniture, etc.)
The board can be built for under $25 in small volumes, so we've also achieved our accessibility goals.
![]()
(a lot of improvements are under the hood. it takes quite a bit to reach a "milestone!")
So what's next?
Haptics has become a rather active space in the last few months - Apple's 3D/Force Touch has attracted a lot of attention, and shows what I believe to be the future of haptics. I've been playing with (and dissecting) their hardware, and I've got a whole lot of hints to incorporate into Pathfinder. Essentially, we're going to work with more advanced haptic actuators, and add "sub-pulses" into each traditional pulse, adding a lot of nuance and detail to the feedback that's also more intuitive - meaning faster training and a better UX.
Gesture support is coming soon! I've reworked the accelerometer handling code, so we can now detect patterns over time and respond accordingly.
Getting a proper enclosure to work with will better define the ways we can interact with the user - from ergonomics to feedback. Look out for that soon!
-
Quick HW Update
06/29/2015 at 07:27 • 0 commentsI haven't done a deep dive into the current hardware revision, but now seems a good time to update the BOM in the spirit of THP.
![]()
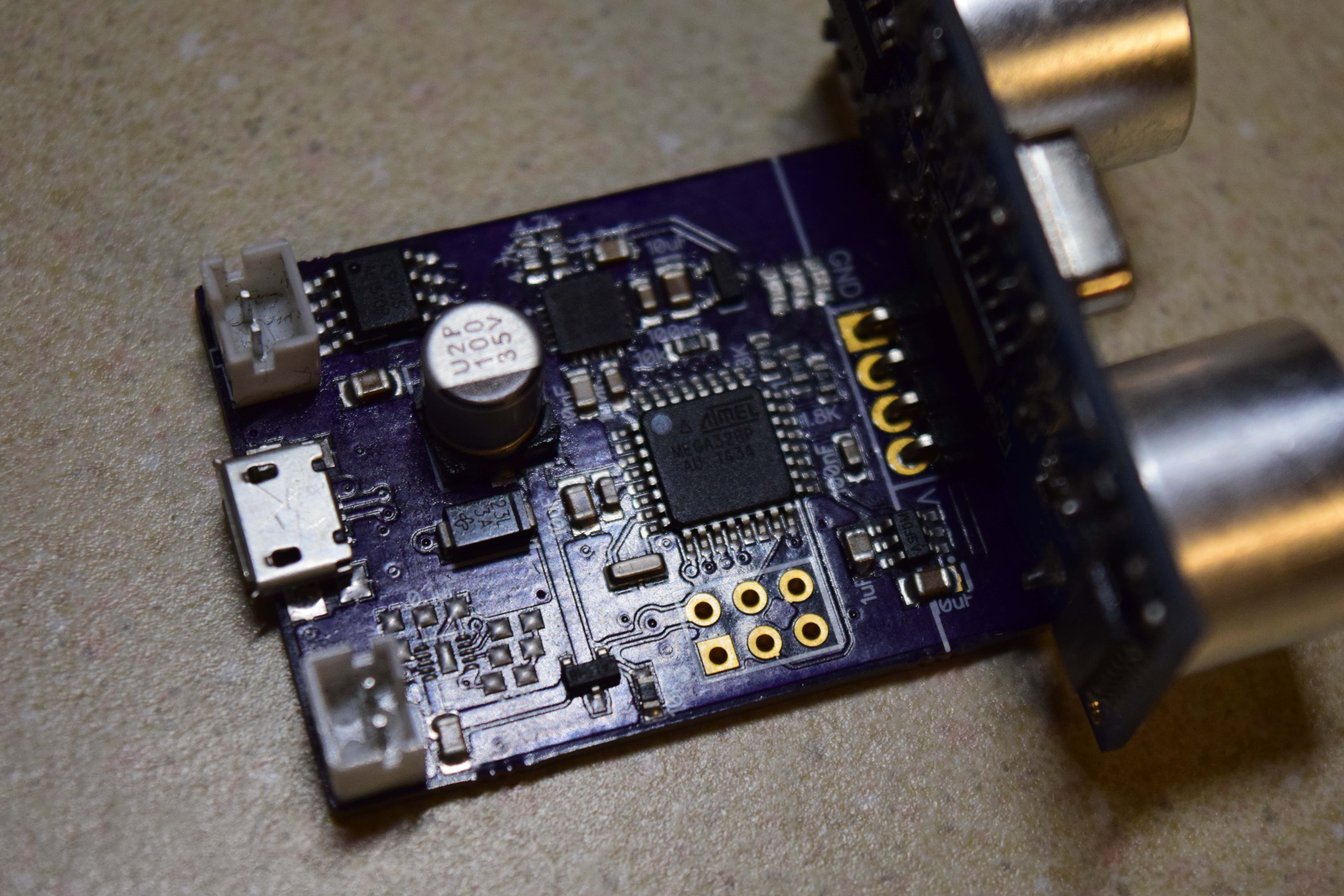
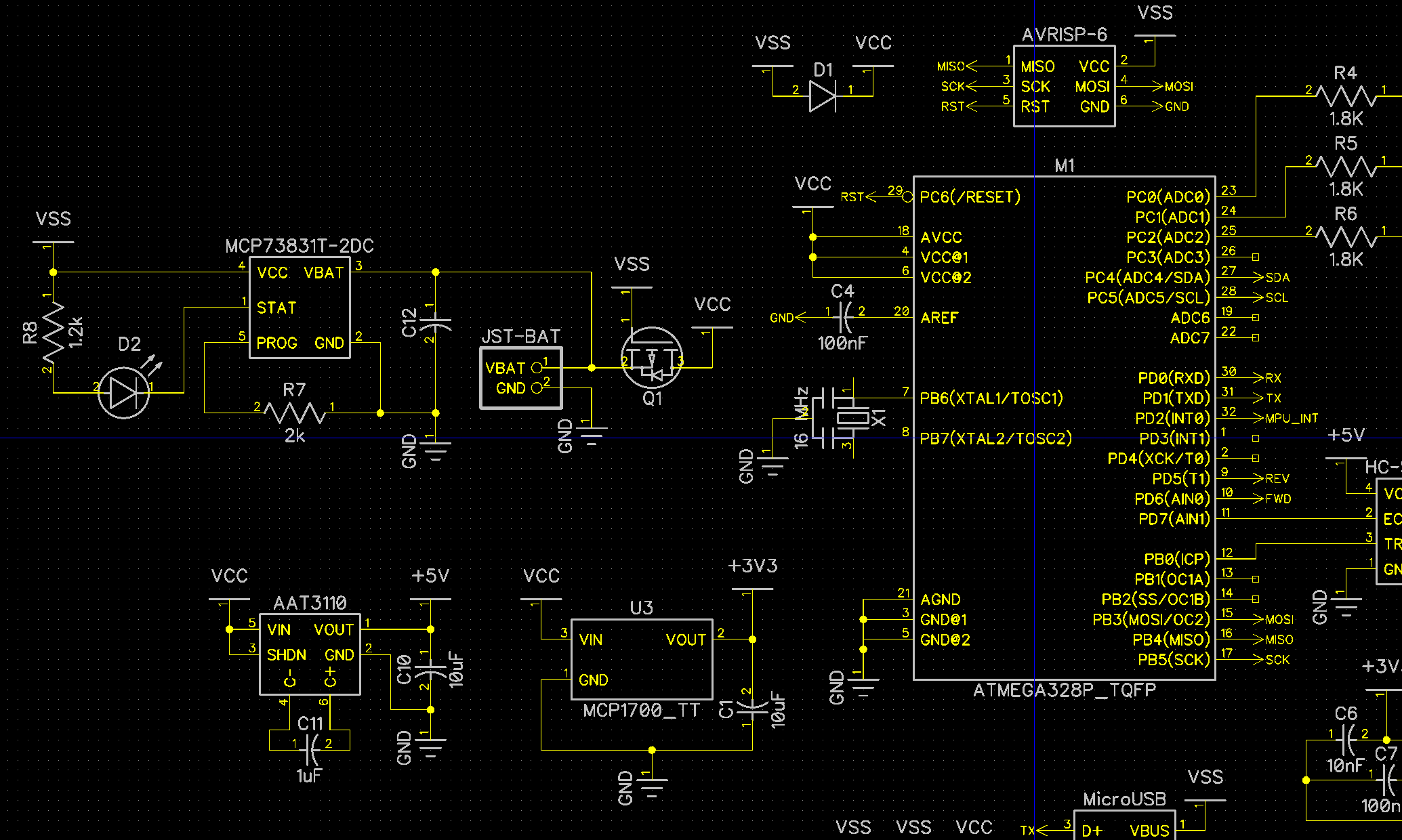
This is the current HW schematic (DipTrace, by the way), and I'll just briefly point out the parts of especial interest to HaD and the sponsors:
- ATMega328P: Of course, we have a very popular AVR running the show. The TQFP package is remarkably easy to work with at the home lab level, and of course the chips themselves take a lot of abuse when prototyping. I've deployed dozens of these across the various prototypes Pathfinder has been through, and it isn't leaving anytime soon. (Low power, simple layout, easy SW dev). When we get closer to production, however, I'll consider moving to an ARM chip (SAM series, maybe?) that might offer more HW amenities at the price of increased complexity.
- MCP7381: The venerable LiPo charger IC found in so many designs. Very easy to work with compared to some of the very fine pitch DFNs other ICs come in, and the power rating (500ma) is great for a wearable system. Also the best price/performance I could find in reliable stock, so it was an easy choice.
- MCP1700: A simple 3.3V LDO, chosen for its low cost, tiny package, and clean output. It feeds the IMU on a private voltage rail, providing a layer of much needed immunity from the noisy haptic motors.
- TI DRV2603: Unfortunately, this chip has not been worked into the schematics yet, but will be included on the next stepping. It's a little complex, and it took me a while to get the samples working on a little testbed a built. Now, I'm comfortable enough to bring the IC into the main design, where it will replace a primitive discrete H-bridge that has given me a bit of a headache to date. I picked this chip to seamlessly drive LRA motors, which offer much improved haptic feedback experiences over ERMs. Being able to outsource the complex frequency matching and drive patterns to this chip allows me to focus on the user experience vs. implementation semantics. I'm glad to work with a prevalidated solution, and can't wait to get the drivers onboard. Should be a few weeks or so, but I already have a proven (if on a testbed) layout, so it should be relatively easy.
That's all for now, but I'll update the project description soon to better reflect all the progress we've made over the past year. Thanks!
-
G2 Validated / SW Milestone
06/29/2015 at 06:34 • 0 commentsHey everyone,
Major progress has been made with the G2 revision; I've been busy all week writing software and experimenting with the boards. Here's what's new:
First off, I've cleaned out my Github repo to make my workspace public and (hopefully) easily accessible. Take a look to see the codebase, which is where most of the improvements have been made.
https://github.com/neilmovva/pathfinder is the link; not sure why it doesn't show up on the project page!
Most significantly, the IMU (MPU-6050) is working far better than expected; thanks to Jeff Rowberg's libraries, I was able to get the DMP working great in my implementation. Thus, we have excellent orientation tracking of the user's hand, parsed at 200+ Hz thanks to the MPU's dedicated data filtering logic.
So far, this is being used just to shut off (low power sleep) Pathfinder when it is brought and held below a threshold angle (a 25 degree angle of elevation from ground). I'll keep thinking about other cases to detect and respond to, as well as gesture controls to implement. Please weigh in with any ideas/suggestions!
For other HW developers out there, the MPU-6050 has my recommendation as a solid starter IMU platform. The DMP and libraries available for it make software development a breeze, and obviously the HW platform is simple enough, as I've got the chip working on a basic 2-layer PCB on the first spin tested.
Moving forward with software, I'm working on creating a more stable, mature platform that can poll all of Pathfinder's systems efficiently and cut power consumption.
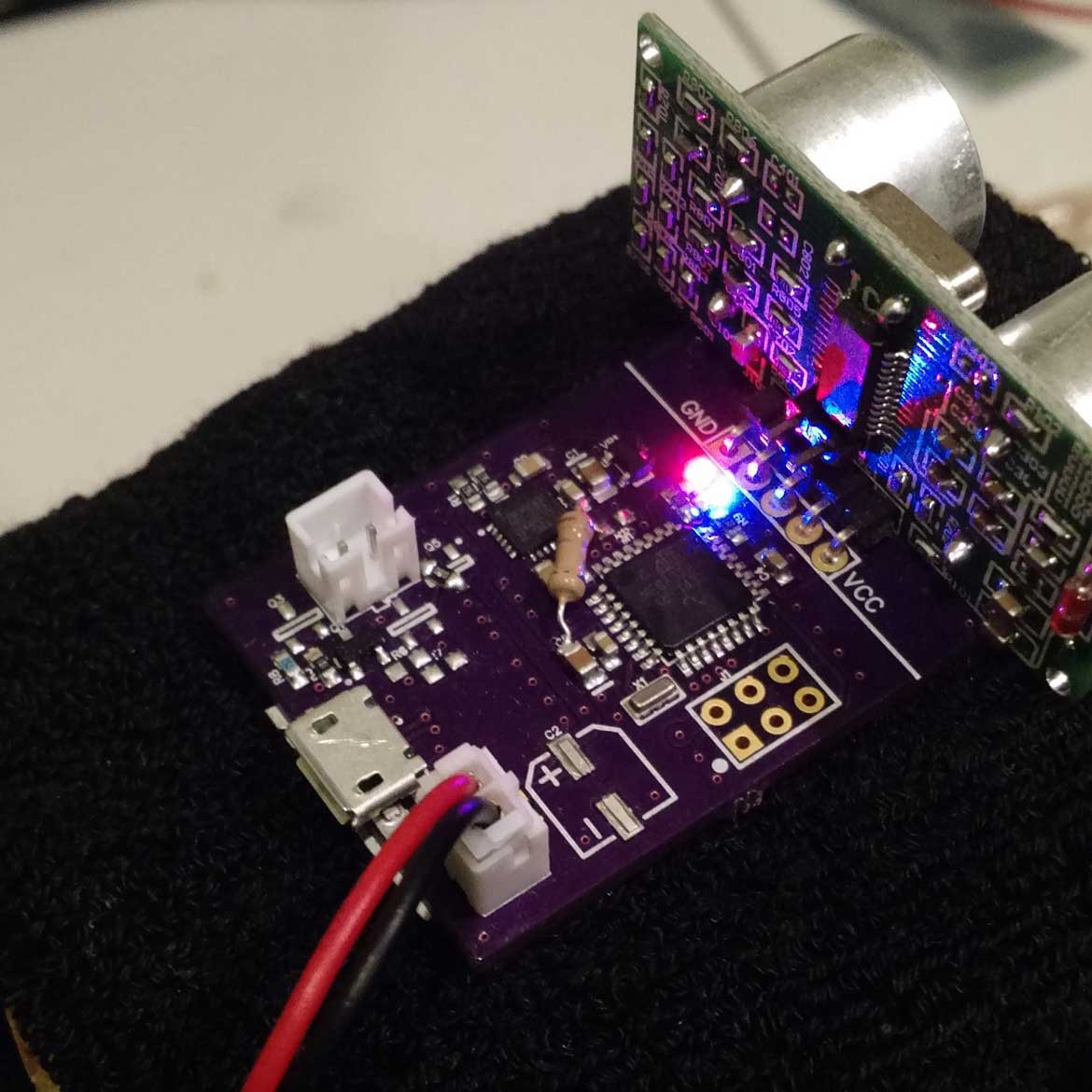
Finally, here's a quick picture from my phone (no SLR, unfortunately):
Next time, we talk about HW rev G3!![]()
-
Checking back in!
06/04/2015 at 09:45 • 0 commentsHey everyone, it's been quite a while since the last update! Development was intermittent over much of the past 9 months, but all those steps have added up to a new milestone revision, which has finally pulled all the parts together.
Pictures coming soon, but here are the major changes:- Added H-bridge drive scheme for the motor, allowing more precise control over haptic patterns (active braking, for example)
- Integrated LiPo charging to the board, then took it off temporarily as I work out the more critical hardware
- Significant improvements to EMC and general grounding/signal integrity, thanks to greater accumulated knowledge. Not entirely necessary, but good to have!
- Added a micro-USB port for serial debug and charging (actually, the UART lines run directly on the TX/RX lines of the USB; they lead to a downstream FTDI board. Basically, I just like the micro-USB connector interface).
- Shrinks all around. Total dimensions are significantly reduced, making it cheaper to manufacture and hopefully easier to integrate, eventually.
- Full code cleanup, hopefully more readable than before. This isn't on Github yet, my sources are all kind of scattered and I need to redo my whole VCS setup. Everything, from HW to SW, will be up soon.
And onto the major, short term to-do list:
- Still gotta get that accelerometer online and verified. I've played with the MPU-6050 before, and have the basic code + some preliminary functions ready to go in the source, but haven't deployed yet since every board has a little defect that prevents use of the accel. I just lost another board to an unrelated power issue, so the new fixed boards should come in sometime this week, at which point we'll re-examine the IMU state of affairs. Certainly, it is the most complicated SW block in the project yet.
- Rebuild the full MVP and re-test usability characteristics, from user experience to battery life.
- Consider rolling my own ultrasonic sensor to enable a better form factor.
- And finally, start considering "wearable" integration more seriously. We have at least progressed to a less obstructive wristband, but actual ship-ready products can't have PCBs or components exposed, so I need to look into an enclosure or some other creative deployment scheme. Still a ways off though.
I'll also fix the lack of pictures soon. This is just, as the title states, a check in to confirm that Pathfinder is moving forward, but we're slowing down a bit as we move out of the barebones prototype phase. Additionally, I'll have much more time over these next few summer months, so progress is coming soon!
Neil
-
Wireless Charging
08/21/2014 at 06:49 • 0 commentsDaily usability is a big concern when designing a device for a disabled population. I take a lot of things for granted, like being able to just plug my devices in when I need to or even hotswap batteries. The reality is, however, that these mundane tasks add a lot of overhead for the blind.
So I need to minimize maintenance of the device.
Wireless charging is perhaps the easiest way to minimize user requirements, so I dropped a little micro-USB header on the board and am plugging it into a generic Qi reciever for cell phones. Will update soon with pictures, charging performance, and a schematic!
-
Quick Update - Project Video!
08/21/2014 at 06:45 • 0 commentsHere's the video going over Milestone 1 of the project!
-
Using IMU (accel/gyro) Data
08/21/2014 at 06:43 • 0 commentsI really like the MPU-6050. It's a small, 4x4mm QFN chip that has an accelerometer, gyroscope, and a legendary "DMP" that we'll get to in a minute.
But first, why do we need spatial data?
At first, my goal was to give the wearable device a bit of contextual information: the user is probably not using the device 24/7, and asking them to turn it off (which currently amounts to pulling out the battery :) ) isn't feasible. So the device needs to be able to sleep at times when reporting distance is useless (if the device is sitting still, potentially not even worn) or annoying (vibration when the device is pointed to the floor while walking.)
Now, Milestone 1 (heretofore MS1? Please?) has a "dumb" spatial response: if the device is unmoved for >2 minutes, OR if it is pointed more than 60 degrees below the horizon, it enters sleep mode.
But there are potentially some use cases where these situations are a part of normal operation: pointing at steps, for example, would not be possible with this blanket rule.
I'd like to detect discrete gesture patterns, and define device behavior that way. For example, detecting a natural walking gait, and sleeping only during the bottom sweep of the swing.
This would also be rather important in prolonging battery life, as the motor is by far the most significant power consumer.
In any case, that's where I'm headed, but I'll need to wrap my head around those beautifully complex quaternions returned by Jeff Rowberg's MPU-6050 library first.
Also, sourcing expensive sensors from China often ends poorly :(. My current boards do not work with the raw MPU-6050 chips coming from China; they return wildly unstable values but otherwise expose the right data structures and I2C commands. It remains to be seen whether this is a fault with the ICs, or the layout itself (lots of passives to support the chip!).
-
On Haptic Feedback
08/21/2014 at 06:10 • 0 commentsAt this point, "Haptic Feedback" seems more an art than a science.
One of the central challenges in this project is the communication of sensor data to the user in an intuitive manner. Now, blind people are often described as having significantly enhanced tactile senses, which would make sense considering the precision and sensitivity that's needed to quickly parse Braille. So when I first brainstormed feedback mechanisms, haptic feedback seemed an obvious choice.
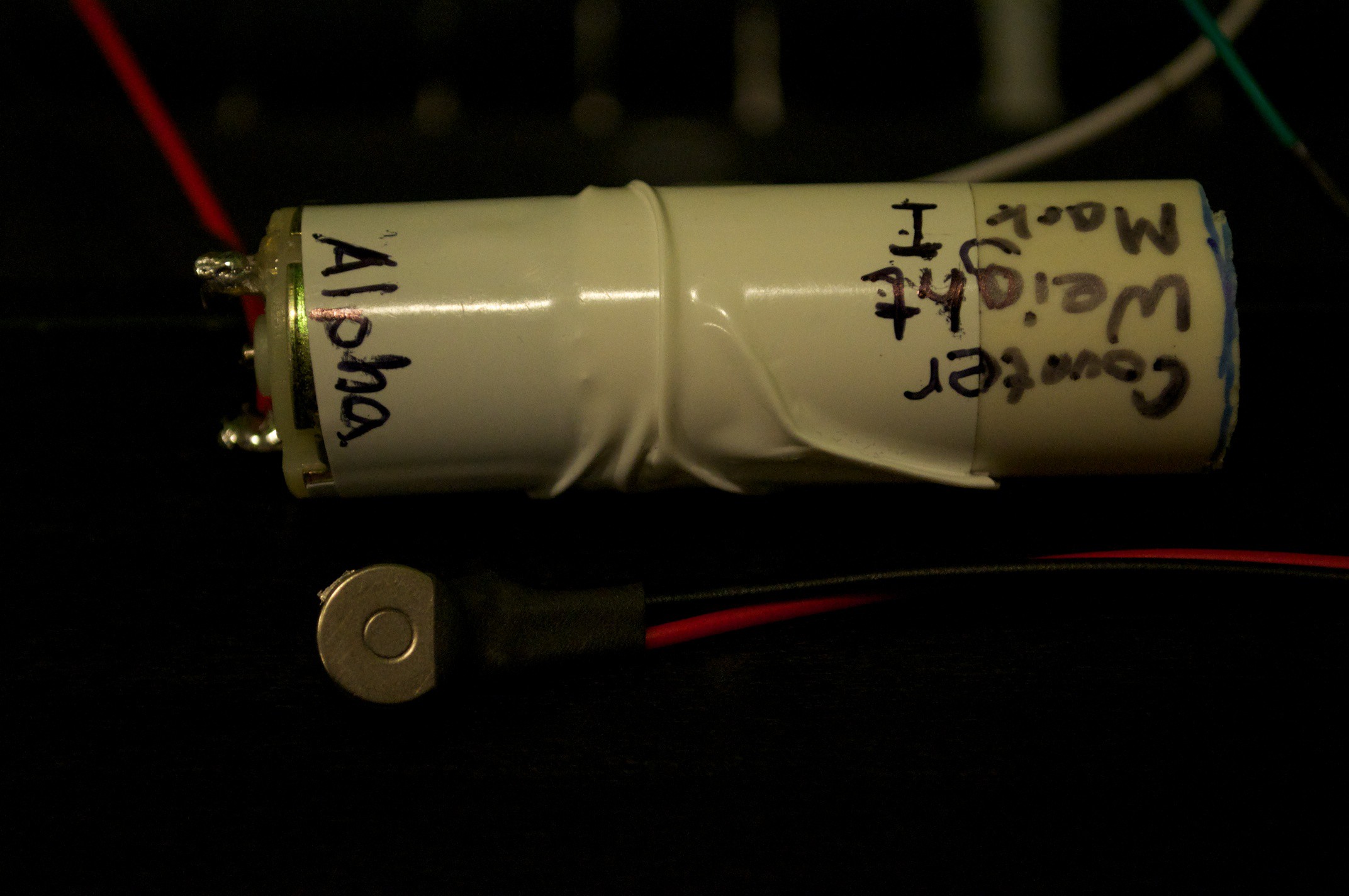
I started with this funny-looking prototype:
![]()
Prototype (marked "Alpha") on top, current LRA iPhone motor on the bottom
It was a DC brushed motor with a piece of rubber glued to the shaft. When the motor spun, the imbalanced weight would cause the whole frame ("frame" is a fancy word for a piece of PVC pipe, taped to the motor) to vibrate.
The very first breadboard example just varied the voltage available to the motor (through PWM). I immediately ruled that out as an unusable option: It was near impossible to feel subtle changes in vibration intensity; in fact, I had an easier time listening to the motor's hum to discern changes.
I started working on a better feedback system right away. Not too many hours later, I had a new version setup that pulsed the motor regularly, and by varying the time between discrete pulses, I had a much more workable sensory range. In fact, I was so satisfied with this new pulse based model that I hardly changed it at all while the rest of the design evolved significantly.
Switching to a small, disk ERM motor, not unlike the LRA version pictured above, allowed for much more refinement in each pulse, as the small motor was faster to spin up and slow down.
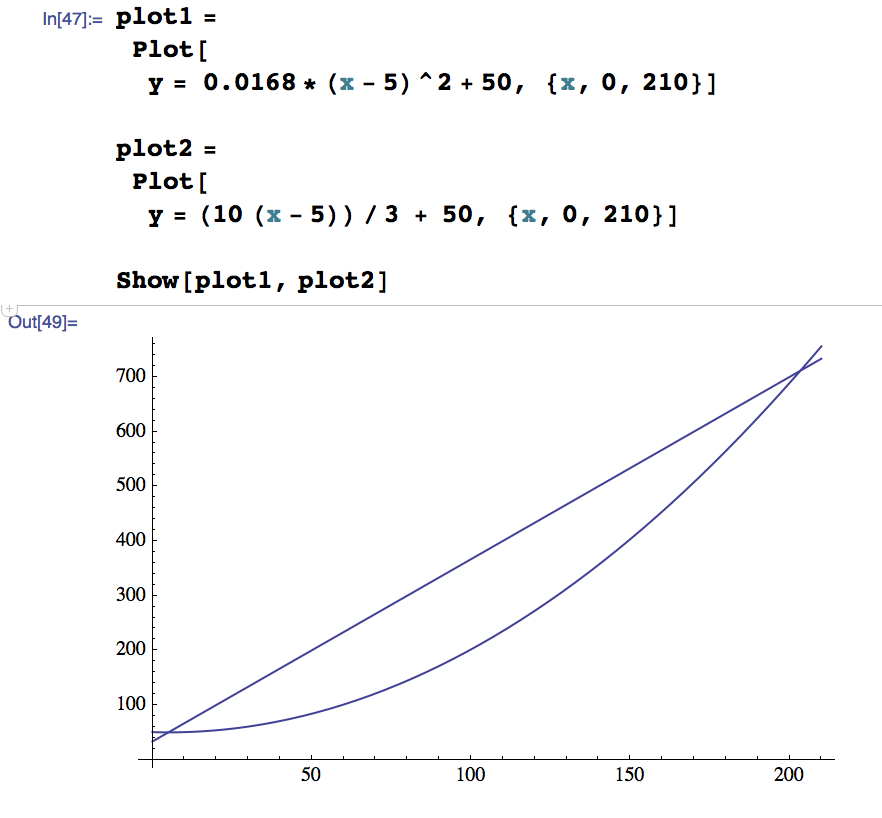
But the software was still limited to a simple linear relationship between pulseDelay (time between discrete pulses, which are 20ms blocks of motor ON time) and distanceToObject. This setup provided a solid 10cm resolution over the 250cm target range, but
1) that's not good enough (it never is!) and
2) 10cm is waaaay too large at ranges <50cm, and not nearly as important at ranges >150
So what we really need is a curve of some sort. I tried my hand at modeling something in Mathematica:
![]()
Old linear function is a line, New curve function is a curve
But most people who tried it felt little, if any, difference.
That's when I realized what I really wanted: a logarithmic function.
Humans don't feel numbers - what I mean by that is, we're not sensitive to numerical changes in the pulseDelay. Although we maybe can feel the difference between 1000ms and 500ms delays, we certainly don't think in terms of the time between the pulses: we're more inclined to say things like, "oh, the frequency just doubled." Or at least that's what makes sense in my head.
With that in mind, I believe an ideal "quantitative haptic feedback" system should be focused on a base 2 logarithmic scale, whereby a user can easily point to different points on the range between which the pulse frequency roughly doubles.
This system has the fundamental feature of redistributing our finite feedback range (by the way, "feedback range" refers to the fact that the motor can only pulse so quickly and slowly without becoming annoying or insufficiently informative. In my experience, this range is from 50ms to ~1000ms.). Now, the pulse frequency will double over fairly small distance changes when in close proximity, while the same doubling points will be spaced much further apart at longer ranges.
So that's the game plan to bring our haptic feedback to the next level. I'm also looking into haptic driver ICs that allow us to:
1) use cool LRAs that are supposedly superior to ERMs in providing haptic feedback
2) potentially output cleaner, more controlled pulse than a simple square wave through a transistor.
More on the new IC soon! Unfortunately, they cost >$2 in small volumes, a big step over generic transistors...