 ajlitt
ajlitt"If you were plowing a field, which would you rather use: Two strong oxen or 1024 chickens?" -Seymour Cray
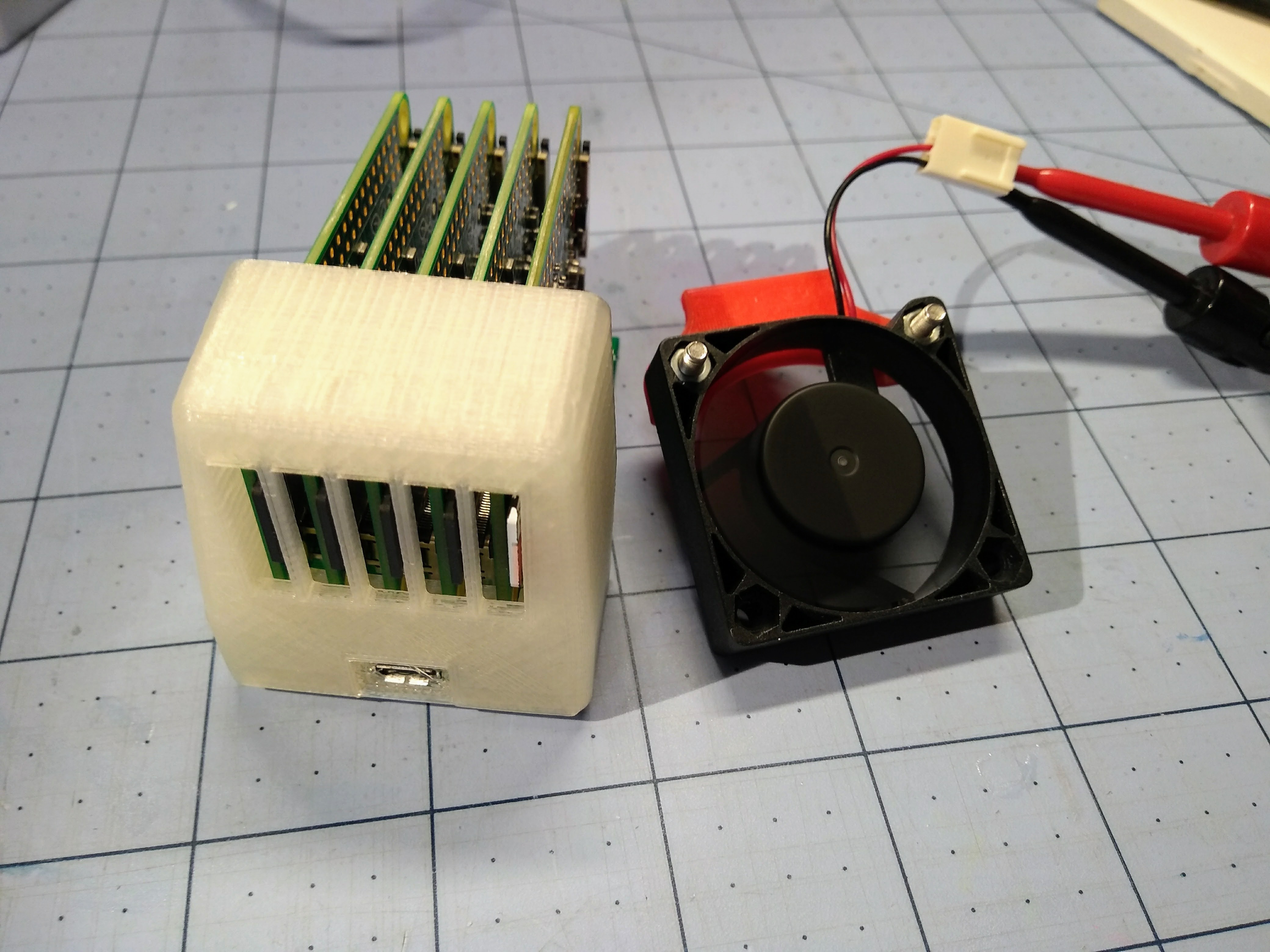
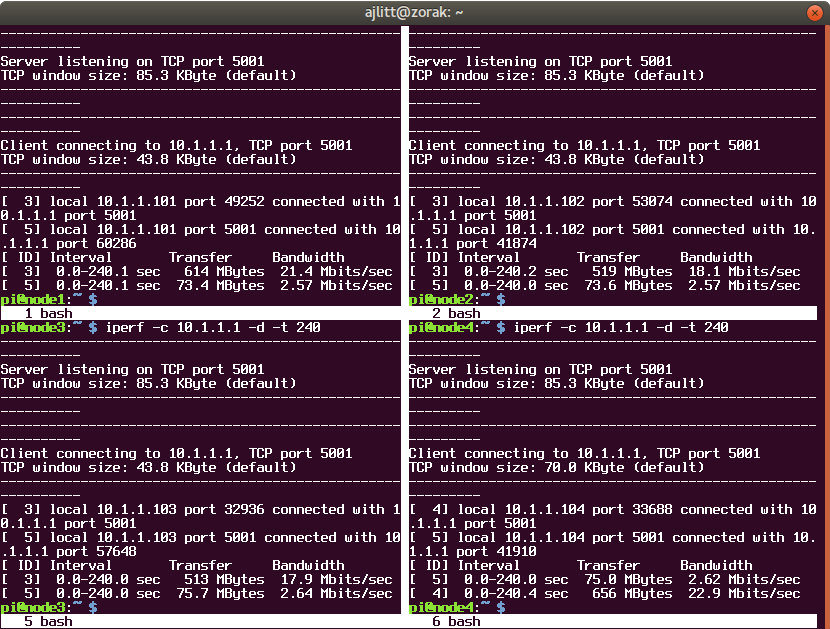
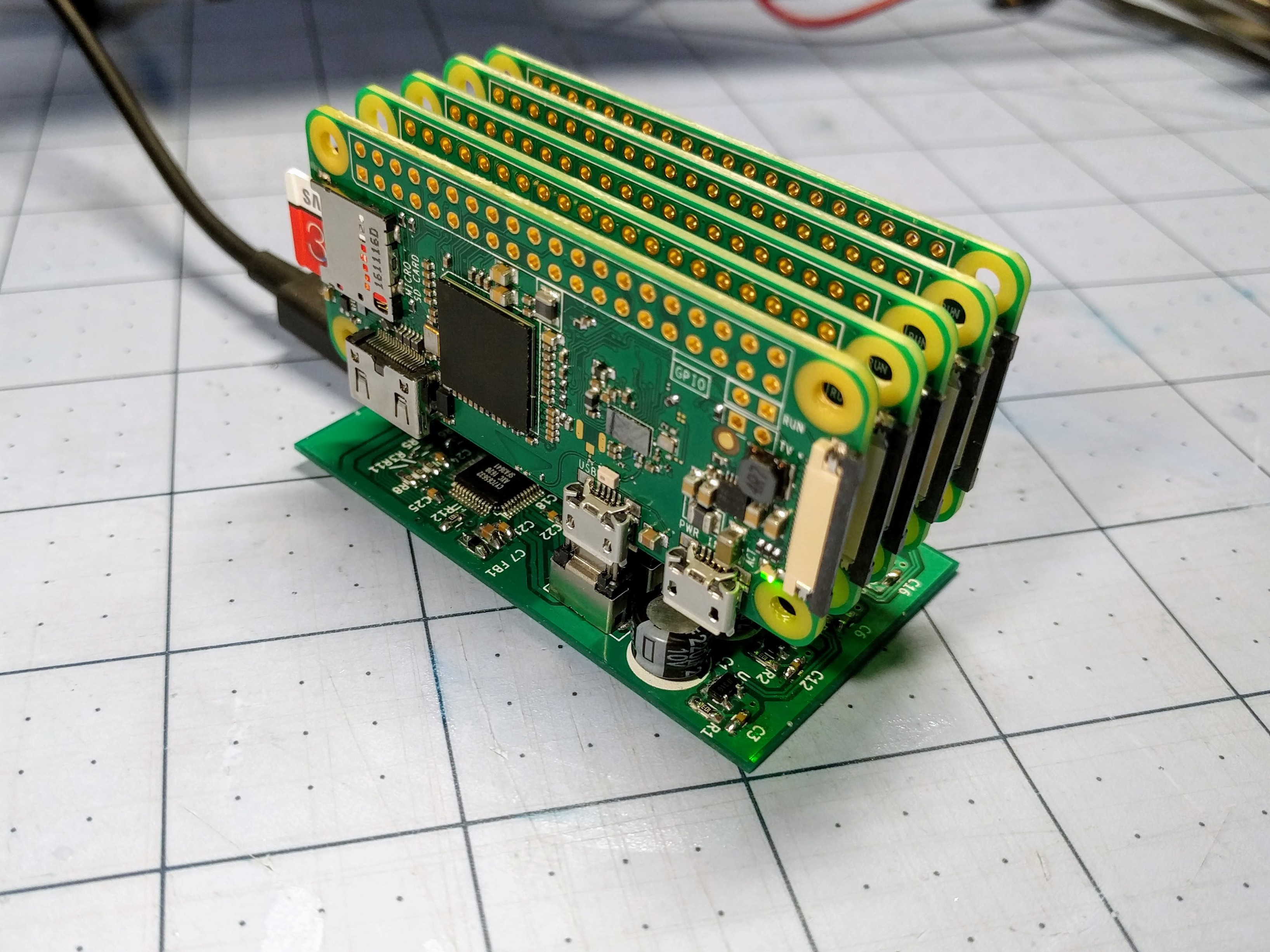
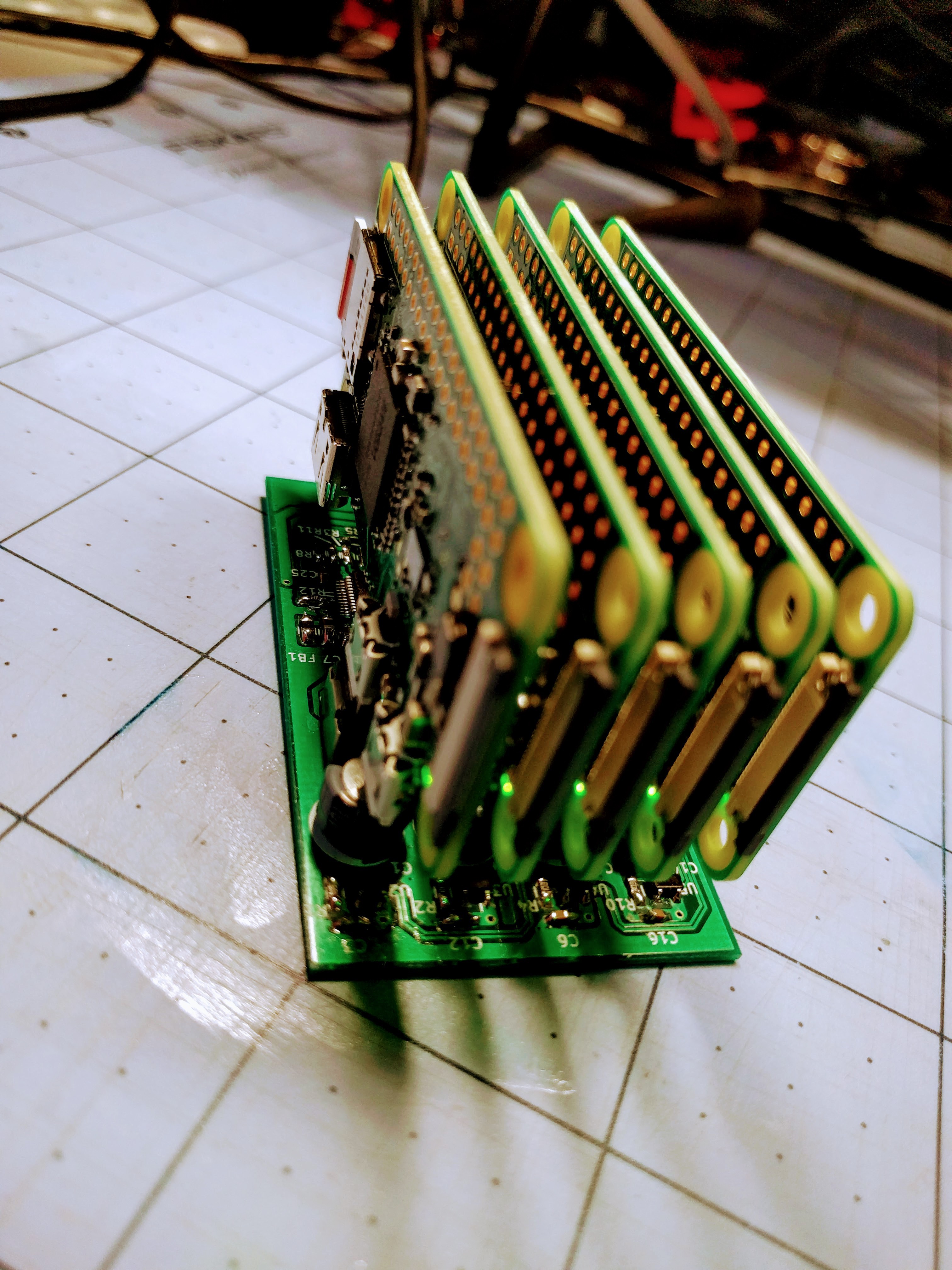
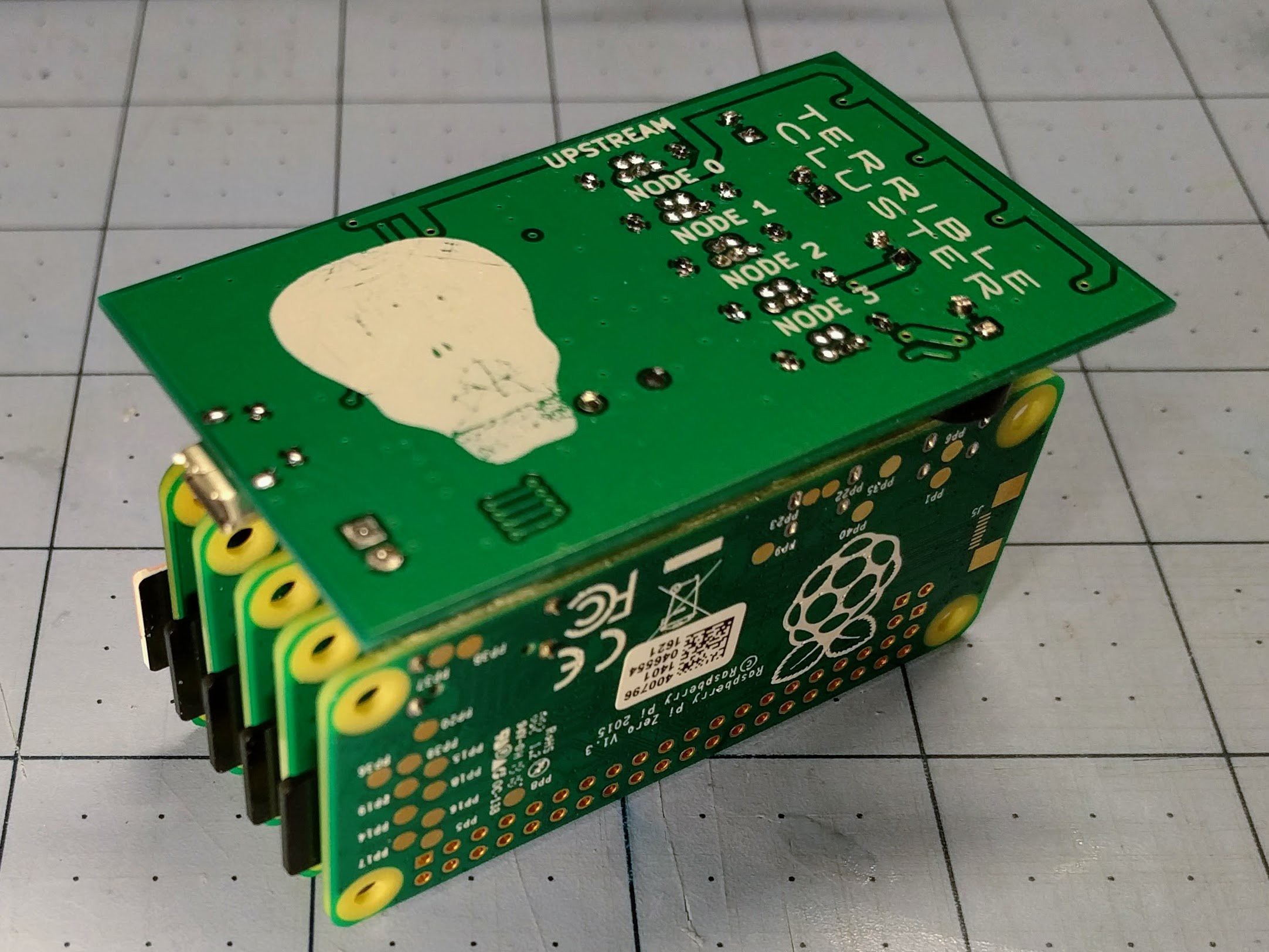
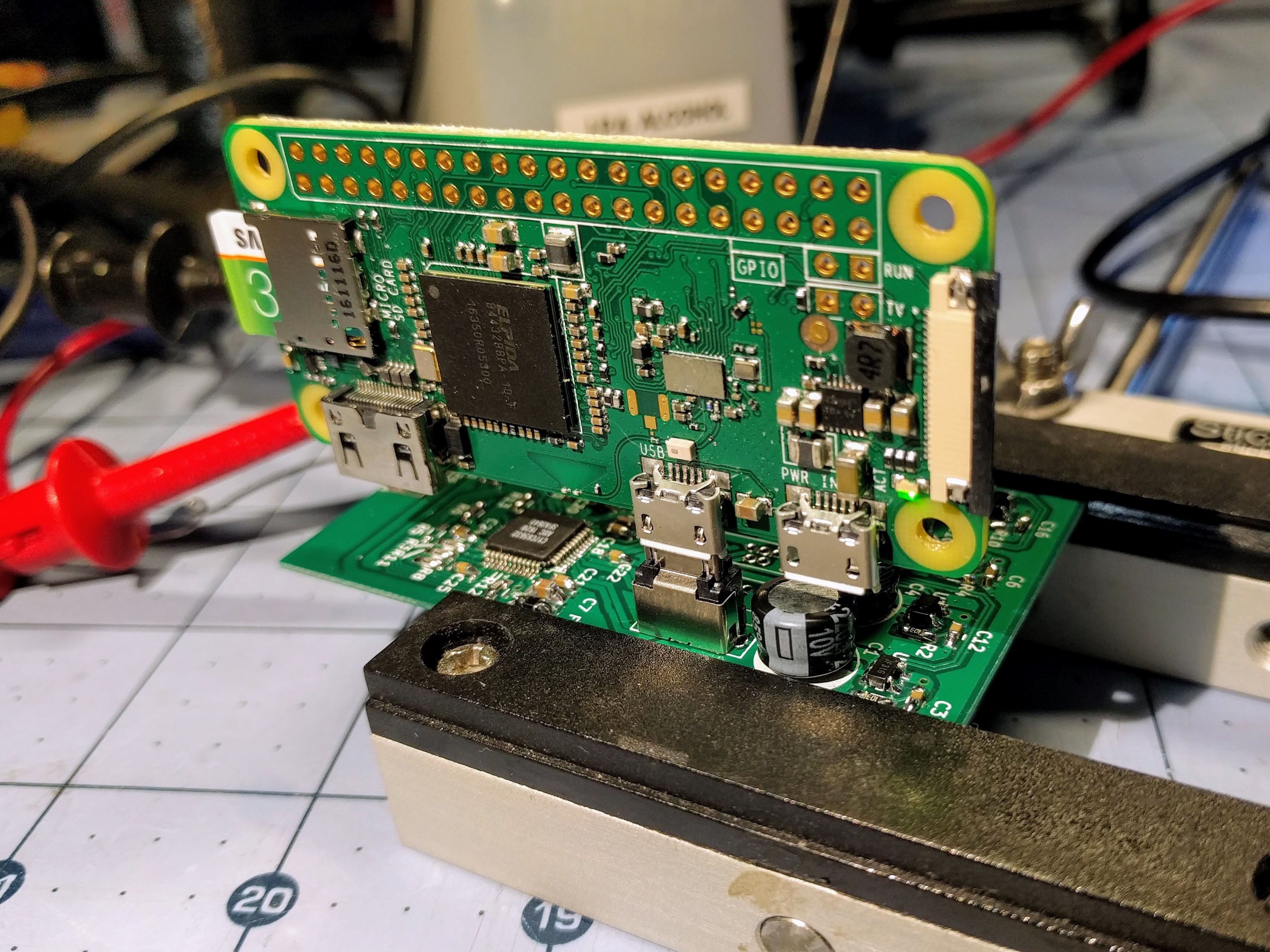
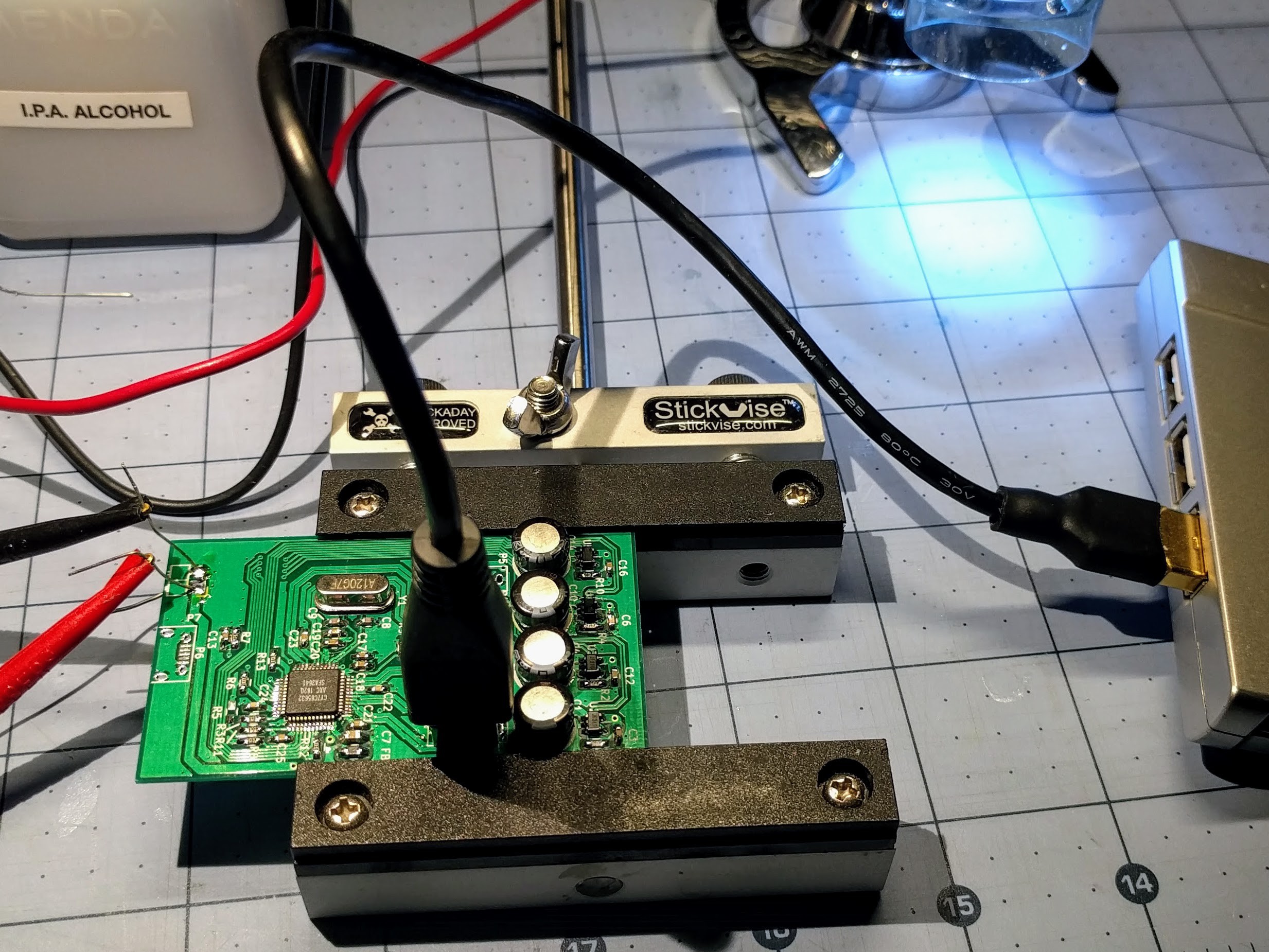
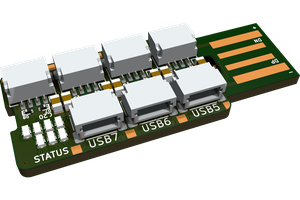
Terrible Cluster is possibly the worst example of a computing cluster imaginable. Four Raspberry Pi Zeros each offer up their puny decade-old ARMv6 core and meager 512MB RAM for computation. Meanwhile, a Raspberry Pi Zero W head node tries in vain to direct traffic across an inappropriately named "fabric" using USB 2.0, host a distributed filesystem, and control power to the compute nodes. The Terrible Cluster backplane board powers and connects all five Pis together using a Cypress USB 2.0 hub and four USB power controllers. Through hole micro USB vertical plugs allow 6mm spacing between nodes which results in a high density compact system that fits easily in the e-waste recycling bin of your local electronics retailer, under the tire of a passenger vehicle, or down the bore of an abandoned oil well.
I created Terrible Cluster to further my experience working with cluster systems and to play with strategies for cluster deployment of firmware and applications. This hackaday.io project is a fantastic opportunity to strengthen the above self-delusion through accumulation of Internet Points in the form of views and skulls.








 rbtsco
rbtsco
 Paul Nicholls
Paul Nicholls
 helge
helge
 ACROBOTIC Industries
ACROBOTIC Industries
why not make a chimney layout?
high chimney and 4 nodes on walls
rectangles , empty inside and on walls nodes , heat air go from bootom to top