 florian.dietrich
florian.dietrich
Using these two tutorial to read raw data :
http://playground.arduino.cc/Main/MPU-6050
http://diyhacking.com/arduino-mpu-6050-imu-sensor-tutorial/
Be careful to use the 3.3V pin to power the board, as recommended in the datasheet and not the 5V.
The test was successful, however to continue we'll have to read a bit about I2C and the way it uses the port INT, SDA and SCL.
The datasheets of the board : Register Map and Specifications, and more info available at I2Cdevlib
Here are some readings from the Serial :
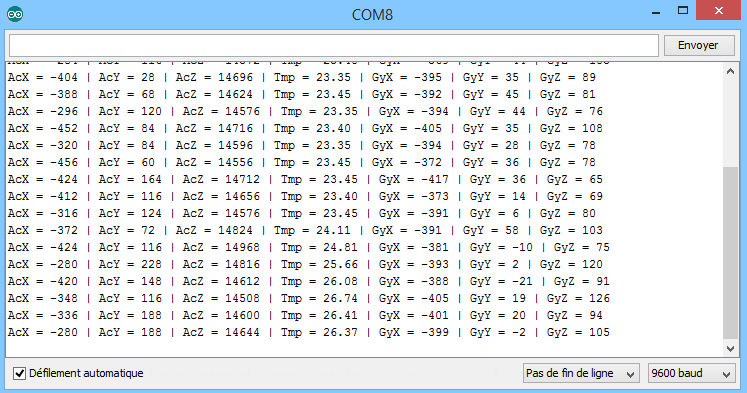
(It even has a temperature sensor)
Here is a capture of acceleration along x-axis :
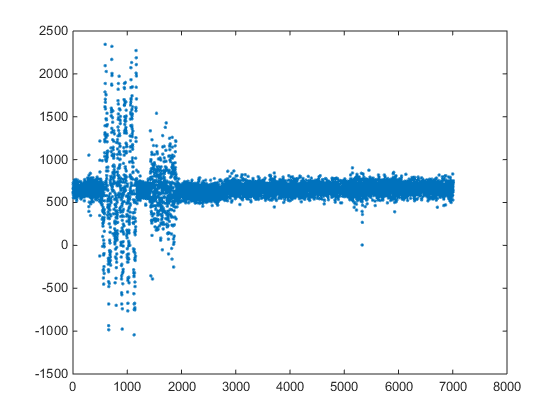
First bursts are due to manual oscillations of the breadboard along x-axis, the along y-axis for the second perturbation.
The use of a digital filter seems necessary to clean the data.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.