 Alexander Williams
Alexander WilliamsHow it works
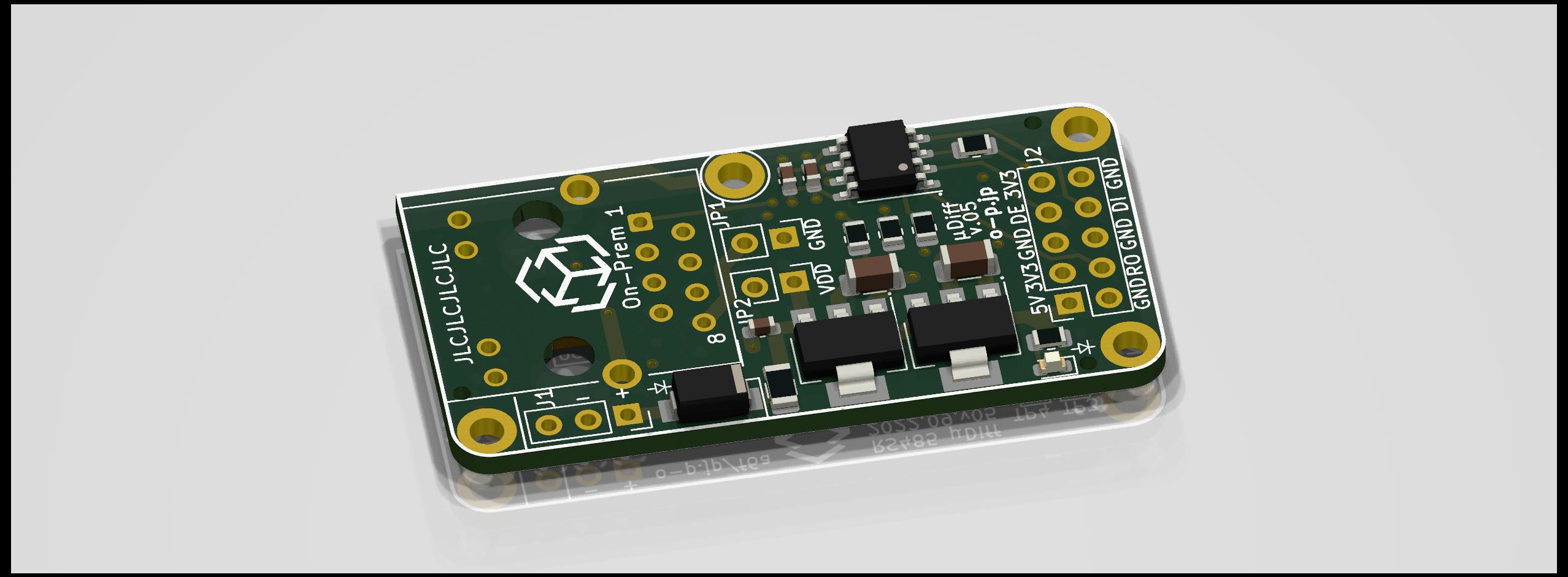
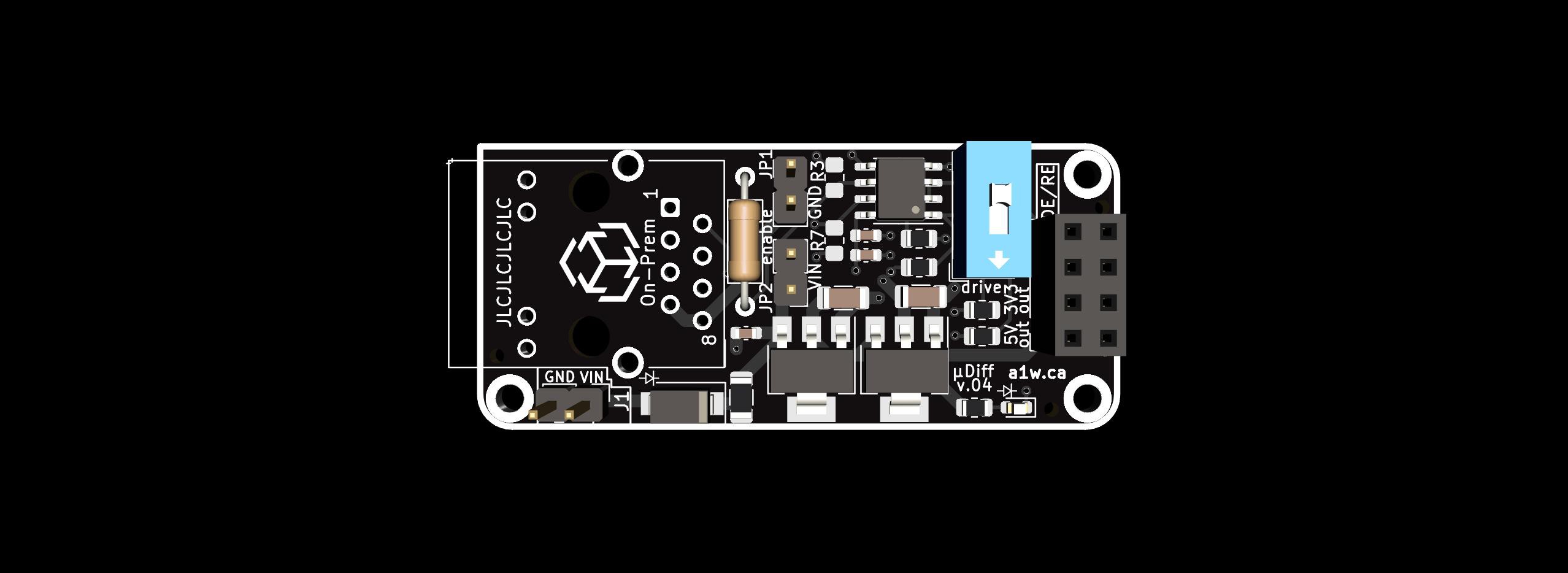
At first glance it should be obvious how this module works, but I'll explain it below.
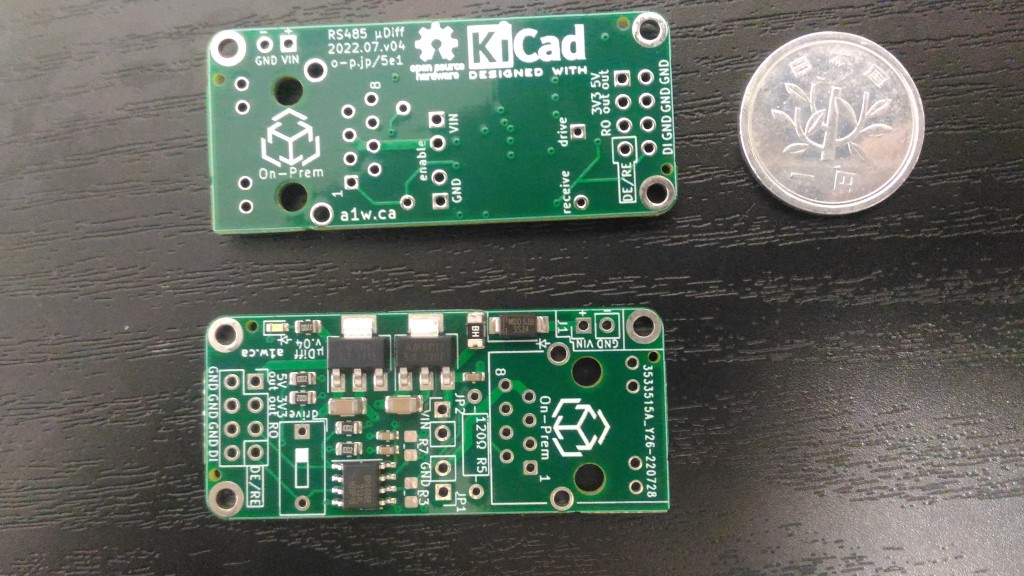
To start, you need minimum 2 modules.
Let's assume one device acts as the driver, and will be connected to an MCU (microcontroller, ex: Arduino).
The other device will act as the receiver, and will be a short string of WS2812 LEDs drawing 200mA of current at 5V (1W).
Connections
The two modules will be connected through a 15 meter AWG26 RJ45 cable, and we'll assume there's a 12V power source near module 1.
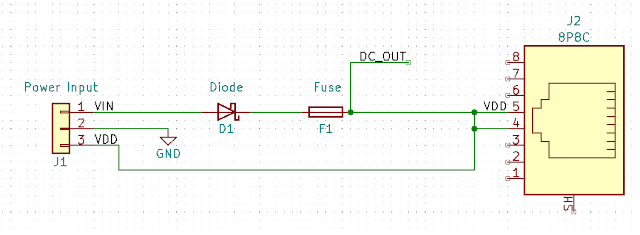
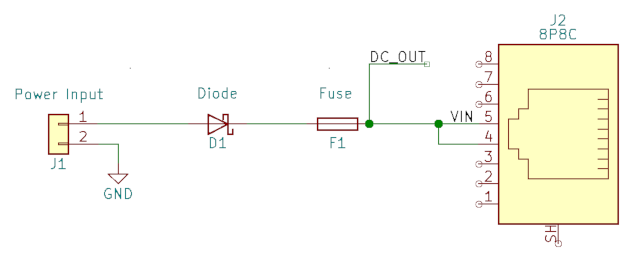
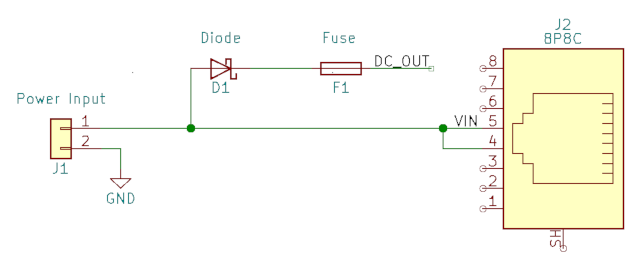
- Connect the 12V and GND from your power source to the VIN/GND pins on module 1
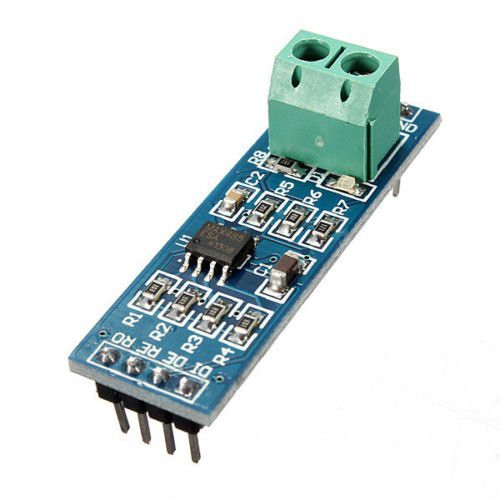
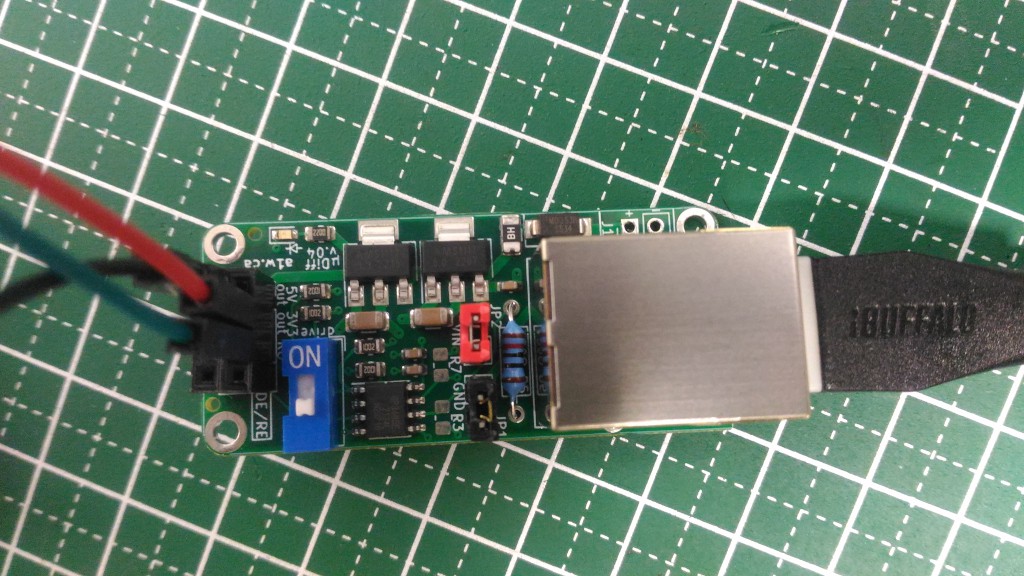
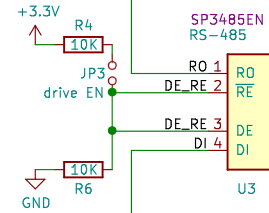
- Connect the 8-pin JST cable to module 1 and wire the other end to the MCU's data pins (and power/gnd if needed), and ensure RE and DE are pulled high (DIP switches in the OFF setting)
- Connect the RJ45 cable between the two modules
- Connect the 8-pin JST cable to module 2 and wire the LED strip to it, and ensure RE and DE is pulled low (DIP switches in the ON setting).
- Profit!
+-----------------------+
| Device |
| (5V LEDs WS2812) |
+--------------+ | |
| +6.5V~12V | | +---------------+ |
| power source | | DI | VIN GND |
+-+----------+-+ +-+--------------+---+--+
| | | | | |
+--------+----------+--------+ +--+--+-----------+---+------+
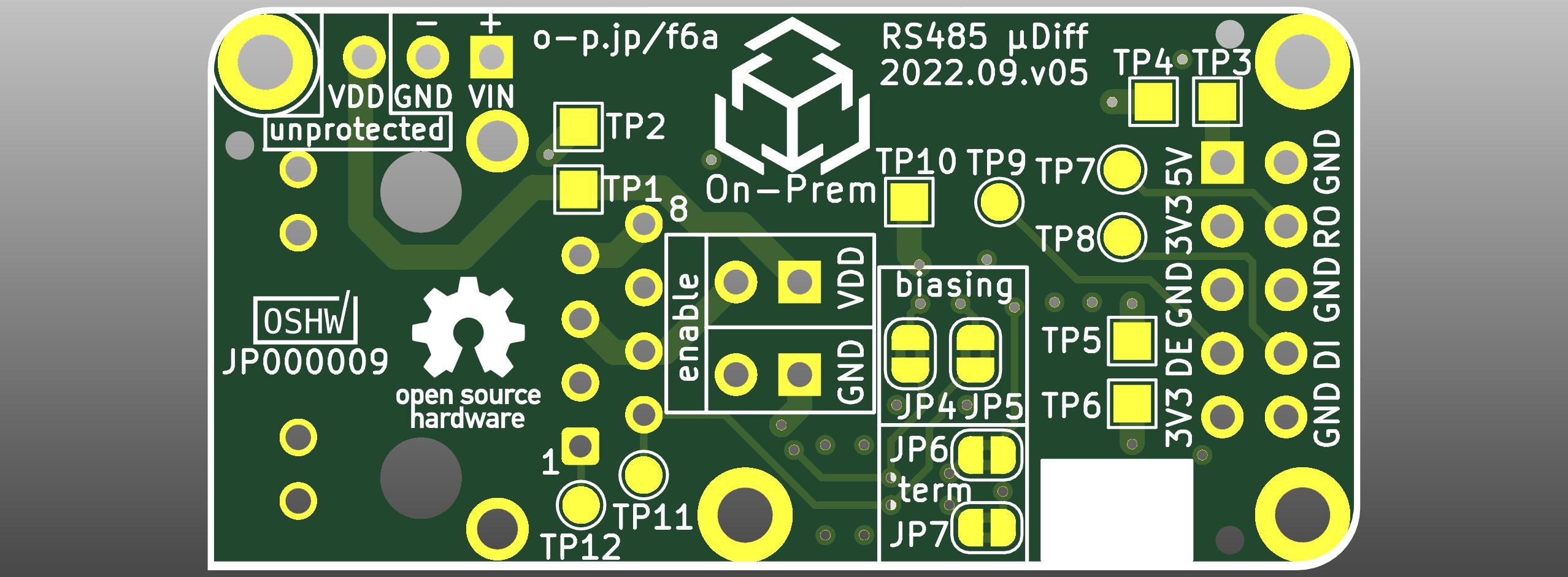
| (+) VIN GND (-) | | RO RE DE DI GND 5V GND 3V3 |
| | 15m AWG26 | |
| RS485/RJ45 +-----+ <-+-+-+-+-+-+-+-> +----+ RS485/RJ45 |
| module 1 |RJ45|| | | | | | | | |RJ45| module 2 |
| (driver) +-----+ <-+-+-+-+-+-+-+-> +----+ (receiver) |
| | | |
| 3V3 GND 5V GND DI DE RE RO | | (-) GND VIN (+) |
+------+---+-----+-----------+ +----------------------------+
| | |
+--+---+-----+---+
| GND VIN P0 |
| |
| MCU |
| (Arduino) |
+----------------+
Of course you'll also need to push some code to your MCU to drive the DI data pin and transmit the signal to the LEDs.
This project is certified open hardware:

Similar projects


 Nicolò
Nicolò
 William
William
 parasquid
parasquid
 icstation
icstation
Is it possible to use these modules in multi-drop applications? This is like the original idea behind Ethernet and many early network interfaces . Each node has a Tx and Rx pair connected to a single twisted pair. Everyone listens for a message with their address. One node sends a message to a specific node address. The receiving node replies with an acknowledgement message. The HDLC protocol would work nicely in this app.