 kelvinA
kelvinA

Introduction
So I went over to the SmartKnob View discord to try and find some answers on motor options. The user K(at)B (the one behind the Ratchet H1) noted the potential implications of airlines likely not wanting to take belts that emit magnetic fields. I also had the concern that these magnetic fields are likely to interfere, especially if a Tentrinsic for the thumb is used.
He then suggested this:
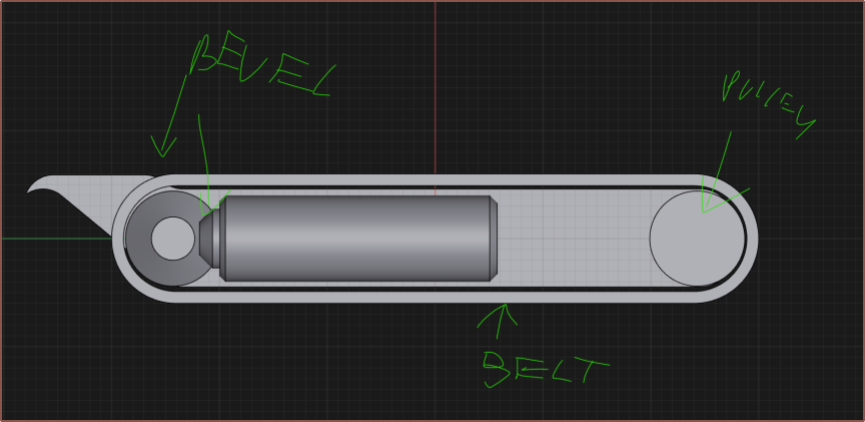
In practice, I'd expect to need 4 gears, not the two shown in the 3D sketch; 2 plastic 0.5M bevel gears and then 2 more gears that transfer the load to the pulley for the belt. He also suggested FSRs, and there happen to be long ones for an ok price, especially since an MCU ADC would be able to read it instead of requiring a fast but expensive 24-bit ADC.
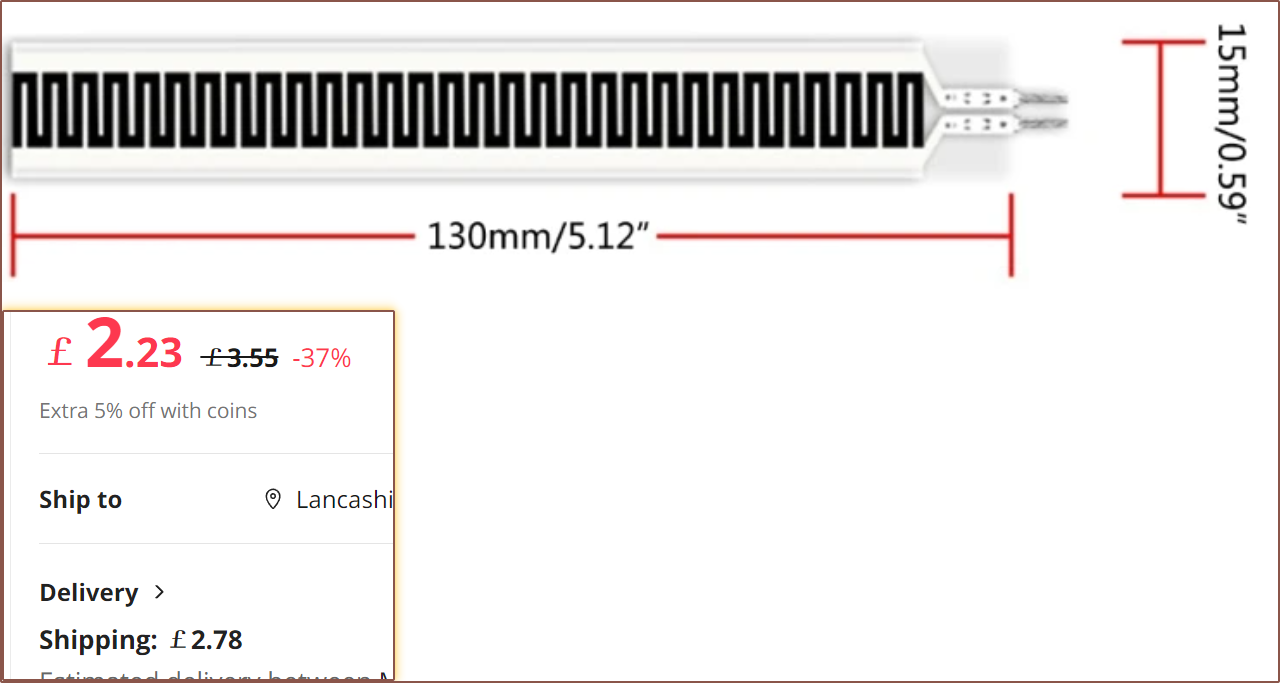
This video shows that scissors can be used to cut the FSR to the required length if needed:
[Apr 27: Edit 3]
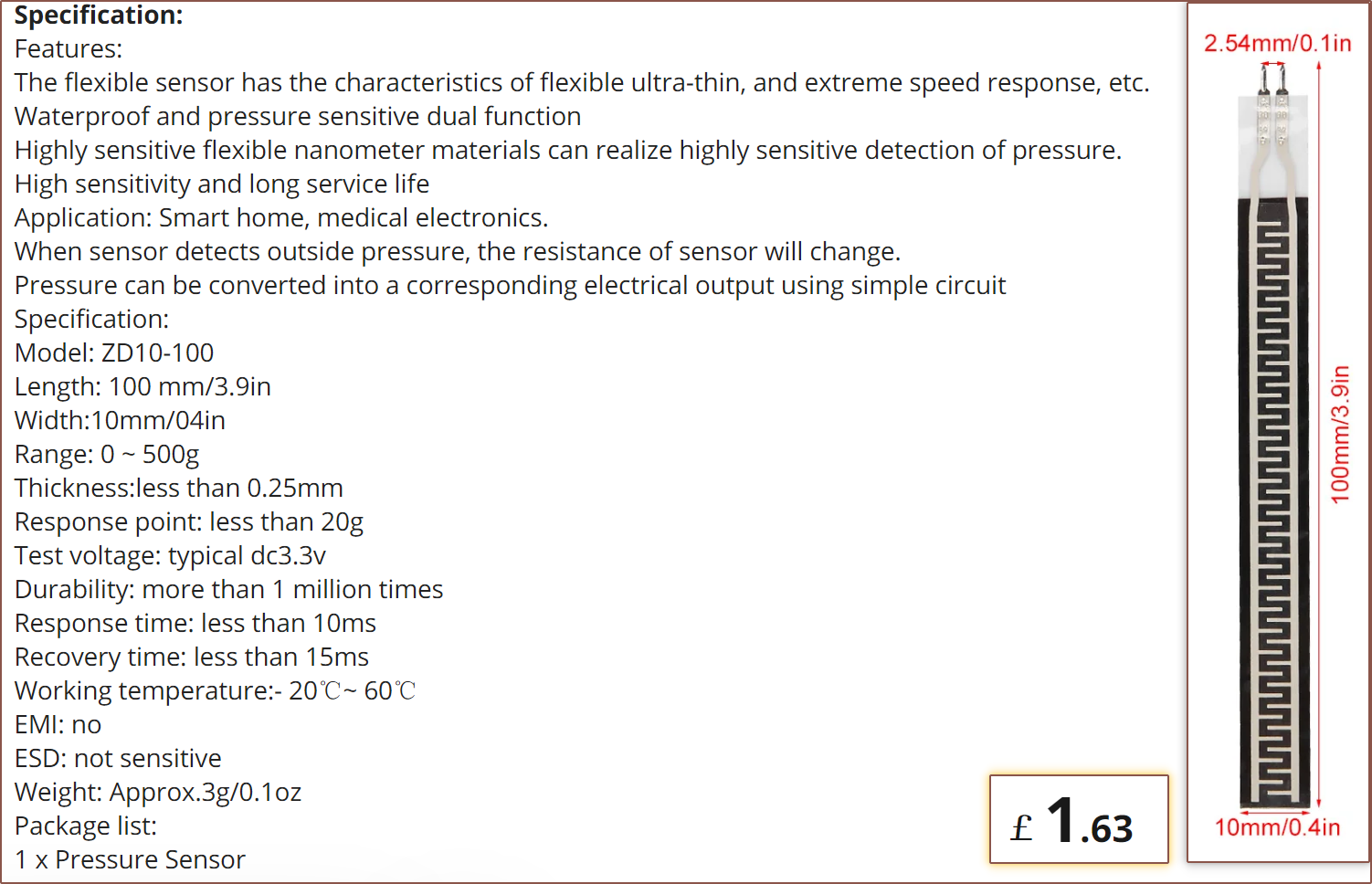
It seems that there's an even more ideal sensor, that works in the 20 - 500g range and is 10mm wide, which are both attributes that I'm looking for. There's also a schematic which essentially says that I can put this in a voltage divider along with a 10kOhm resistor and feed the output voltage to an MCU.
[End of Edit 3]
Thus, this was the start of searching for my motor options. Since 18mm Tetrinsic spacing seems more like "the standard value", and many motors seemed to be 16mm diameter, it makes sense to set the new maximum width of a solution to about 16-17mm.
Things I learned about motors
I think it's best if I fist provide some reference material that better helped me understand what to be thinking about when looking for a motor:
- Lower KV motors are designed to be run at lower speeds and more likely to have minimal cogging.
- KV seems almost irrelevant for coreless / slotless motors that have 0 cogging.
- Torque for this application needs to provide 100 - 150gf continuously and over 300gf peak.
- This is because the former is needed when emulating an analog stick. This site suggests that 75g is "standard", 100g is "hard" and 150g is "strong". Due to potential frictional losses, it's probably better to slightly overspec the standard torque, and that's why I'm aiming for 100gf minimum.
- The latter is to emulate physical limit stops, and isn't expected that the motor will need to produce this torque for more than about 500ms.
- Torque is proportional to current. That's it. Just current.
- It was a bit surprising when I found this out, hence the emphasis.
- The voltage determines the maximum RPM of the motor. This is due to back-EMF generated when the motor is spinning. If it's not spinning, there's no back EMF.
- The voltage and phase resistance determines the max current that can be sent to the motor. It seems that the aim is to get a low PR as that means lower voltage, which results in exponentially less power used.
- It seems that the torque constant (Kt), mN.m/A, is more important than the voltage constant (Kv).
- Smaller wire = more coils = lower Kv, but less current can go though said wire so the effect is cancelled out and thus Kv has no real connection to Kt.
Frameless
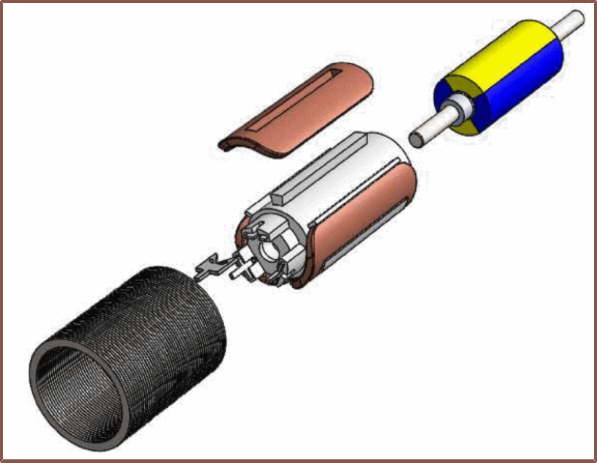
I noticed that, from looking at motors found for the Smartknob View, there were a few motors that were shorter than 15mm. The 2204 260KV motor, for example, is 13mm. However, looking at images inside the motor, it seemed that there was a notable amount of unused space inside. Some time later, I came across frameless motors, where just the stator and rotor magnets are sold:
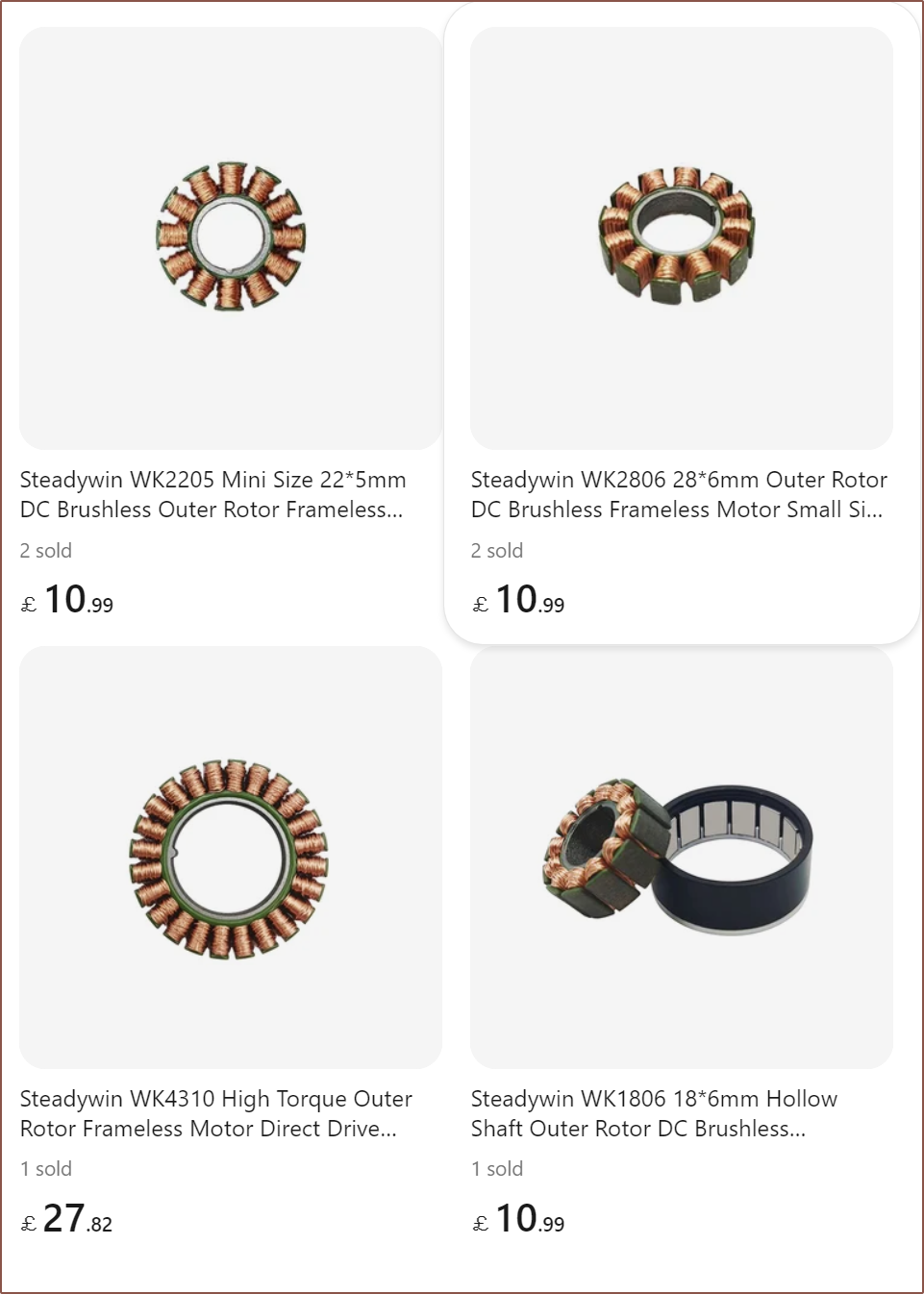
Long story short, these are the only options available, but the good news is that I just need the 1 solution and the WK2806 seems to provide!
- Phase resistance: 5 Ohms
- Kv: 121
- Nominal current: 0.81A
- Nominal torque: 600nM.m
- Stall current: 1.22A
- Stall torque: 900mN.m
Now, you may be wondering "Those seem to exceed what you need. Why not go for the 2205?". Well the issue is that the ball chain has a minimum turning radius, and even if it didn't, the physical motor has it's own radius. This means that the chain is closer 2cm away instead of 1cm from the pivot. Hence, for 150gf, I need 300gf.cm.
The magnet rings for the 2205 and 2208 are 25mm and 34mm respectively and #Tetent [gd0090] will still pass whether its thickness is 31mm or 40mm.
I am in contact with a different seller of the same frameless motor on Alibaba and, currently, the deal seems to be $6/pc and $50 shipping, which after tax works out to be cheaper for 10pcs than through Aliexpress. I feel like the shipping is a bit steep and I should ask if there are slower but cheaper options. The seller did offer to offer to add 2 spare magnetic rings as it's brittle.
I asked about the cogging performance and I got a video of the fully-assembled motor (PM2806), which uses the "magnetic disk" version:

The disk has slightly more torque and the ring is smoother, so i've been told.
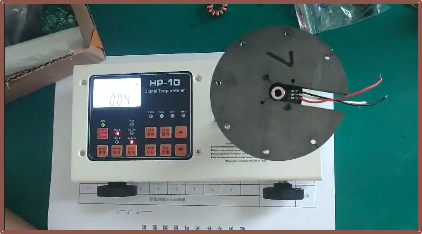 The torque metre recorded a max torque of 0.04kgf.cm, which corresponds to 40gf.cm and thus 20gf on the belt, which is on the lower end of scroll wheel encoders:
The torque metre recorded a max torque of 0.04kgf.cm, which corresponds to 40gf.cm and thus 20gf on the belt, which is on the lower end of scroll wheel encoders:
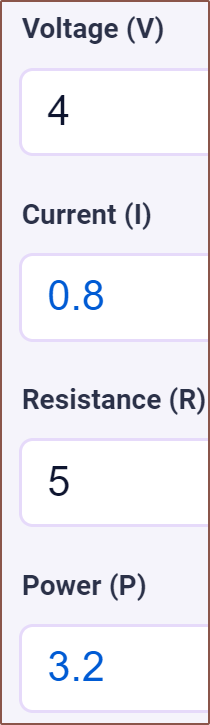
Doing some quick maths, it seems that this motor has a torque constant of 75mN.m/A. When generating 20mN.m of torque (to produce approximately the same force on the belt as the coreless motors below), it's expected that this solution will use 0.356W.
Slotless / Coreless
It doesn't have to be coreless/slotless, but it does seem that all the motors I saw were one of these types. It's beneficial though, since there's inherently no cogging for these types of motors.
I've seen motors as long as 59mm and as short as 36mm, and I believe that longer motors have a tendency to have better torque numbers. This is where those more-realistic torque requirements come in, as there isn't a motor that just happens to have 30nM.m of continuous torque.
For #Itinervate [gd0151], I believe that the enclosure thickness needs to be 24mm or less, which includes a 1.2mm top and bottom wall and 1.2mm of tolerance. Thus, the Tetrinsic to solve for this soluion needs to be 20.4mm or less, which might barely be possible with a 16mm diameter motor and double-sided belt. I think it's probably easier to aim for a round 1 inch (25.4mm), thus Tetrinsic would need to be 21.8mm or less.
An ideal candidate I've found is this 1656 motor:

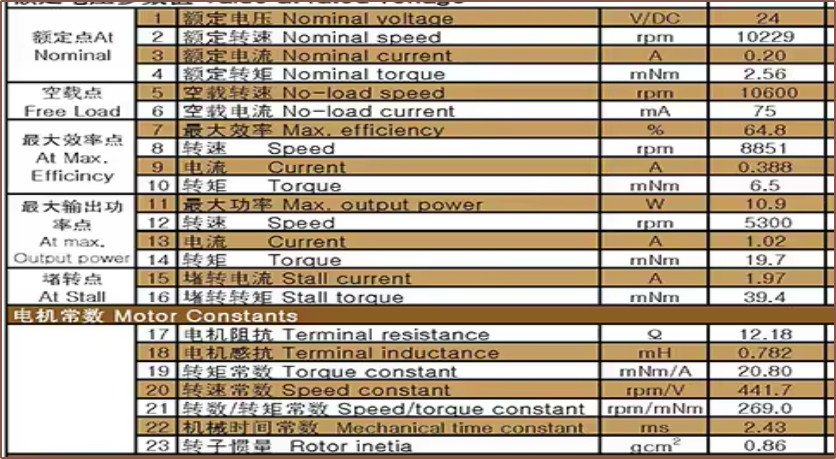
I asked, since the page also specified 2.67 ohms as a resistance, and they said that the phase resistance was up to 2.9 ohms.
Something to note is that the rotor inertia is 0.86 g.cm2, compared to 51 g.cm2 for the WK2806. Many other 16mm diameter motors had similar values, suggesting that it would be a lot easier for this form factor to produce haptic vibrations.
The above motor has the highest torque constant I've seen in my research, at 20.8 mN.m/A, suggesting that I'd need 480mA to get 10mN.m, resulting in only requiring 0.668W. On the other hand, if I provide 5V to the motor, a maximum of 1.72A will flow though the coils, producing 35.7mN.m of torque and consuming 8.6W. Other motors I'm finding can't seem to get that kind of power consumption when generating 10mN.m. For example, the 165603 BLDC uses 3.5W and it's shorter 164603 uses 5.9W.
Unfortunately, I asked about the price and the seller said it's $50/ea with "cheap encoder", and $34/ea without. It also has a brass screw which I don't need.
When I asked if there was a motor without the screw and with a high torque constant, the seller suggested another motor that is $48 with / $32 without the encoder.
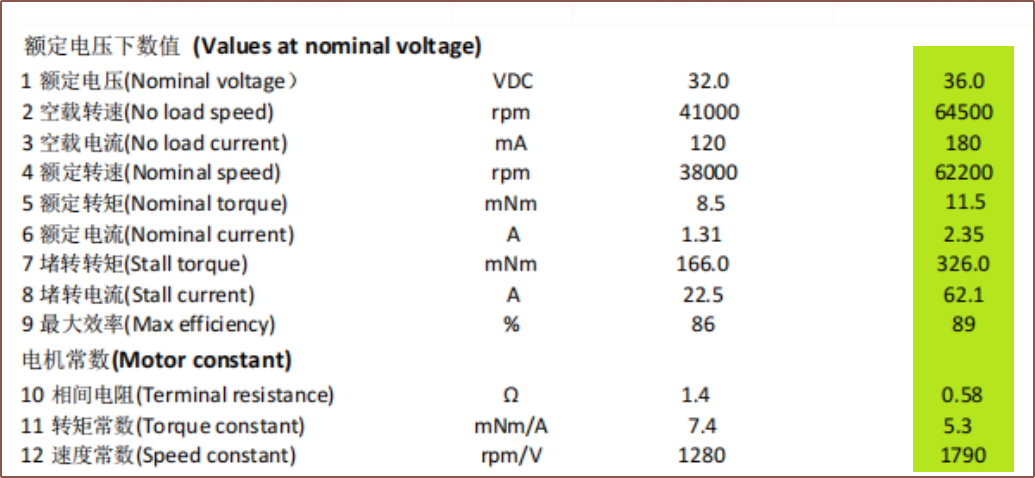
- Diameter: 16mm
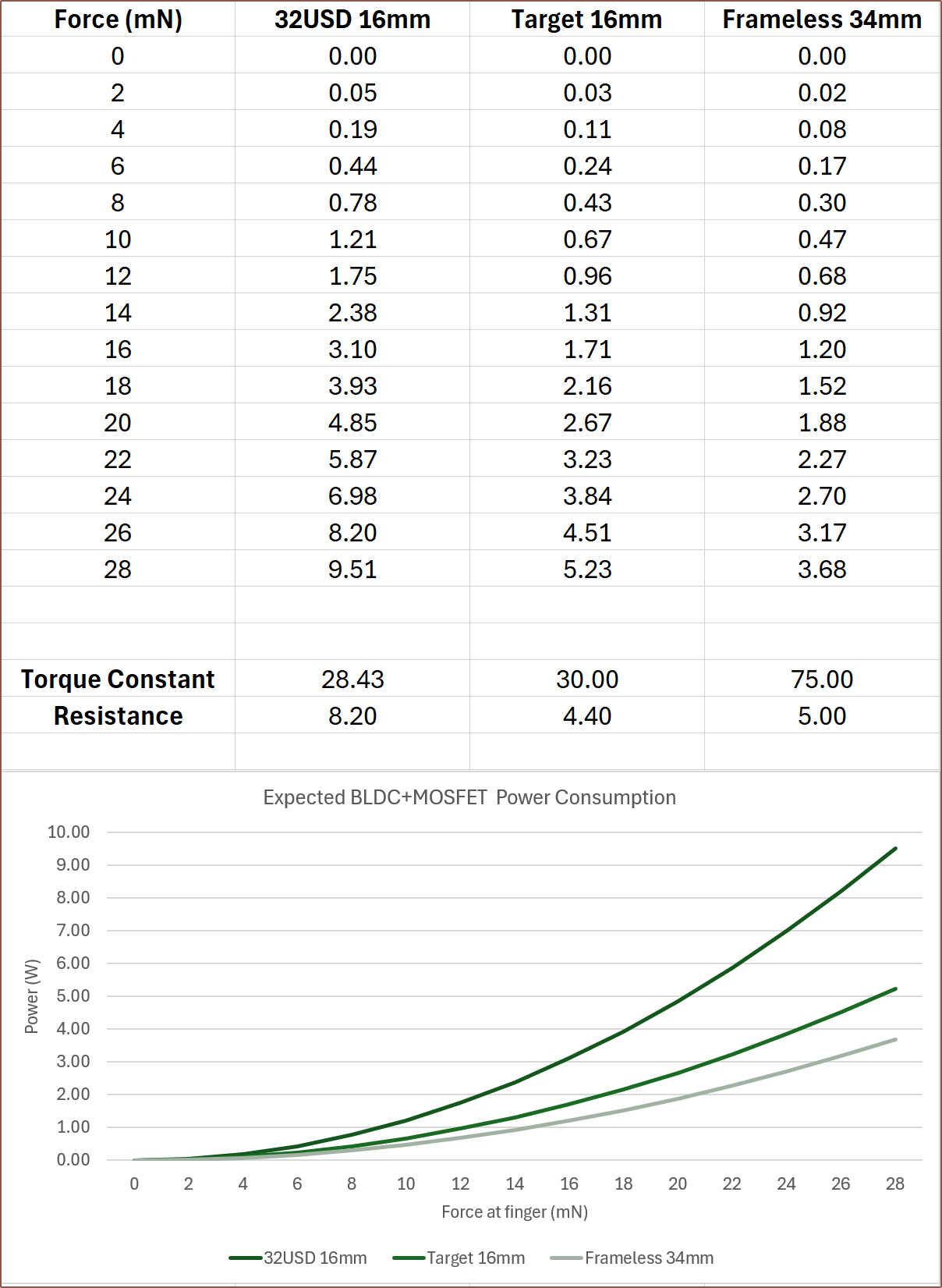
- Torque constant: 28.43 mN.m/A
- Peak torque: 27.86 mN.m
- Phase resistance: 8.19Ω
I predict it would consume 1.01W at 10mN.m. Its stall torque is 28mN.m and stall current is 0.98A, which is a beneficial factor if driven with the STSPIN32G4 (mentioned further below) that has a 1A peak current.
On AliExpress, there was a 58mm motor but it's unfortunately OOS:

[Apr30: Edit 4] It seems that this is the 1659RB from kegumotor, which is $65/ea when ordering in quantities under 100pcs:
[End of Edit 4]
Other motors I've found on Alibaba seem to all share a 3mm diameter shaft too, so I could use the S163A if geometry allows:
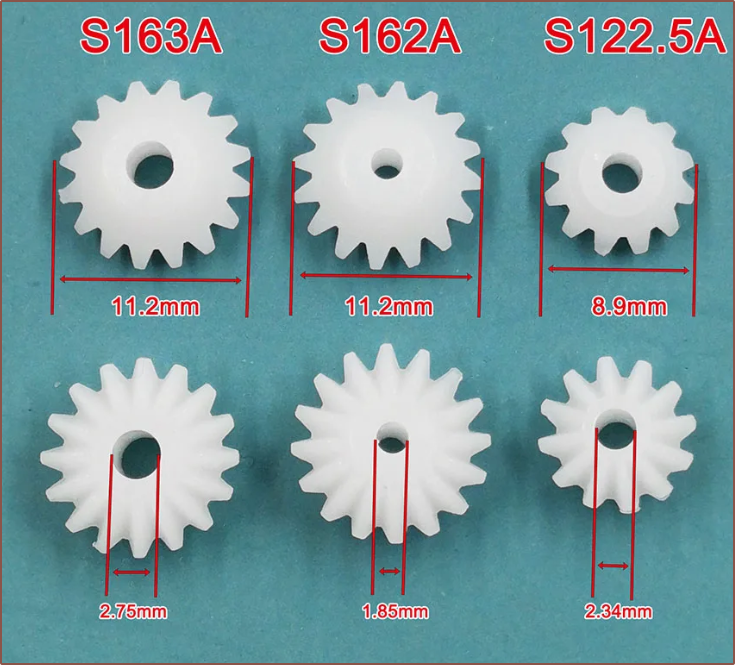
Speaking of gear's, I imagine that there's probably enough space for a 1:2 gear reduction between the bevel and output pulley, which further helps and means that I likely just need to look for a motor that has 50gf.cm continuous and >=150gf.cm stall. The output "pulley" might actually just be a large spur gear.
Making a slotless BLDC?
I've also found the paper titled Low-cost slotless BLDC motor designed for mass production, published in 2021, where it describes how to go about making a 19.4mm diameter slotless motor. 3 phases are wound on a plastic housing using 0.21mm wire:
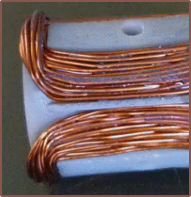
 With this, they were able to achieve the 75mN.m/A that the frameless motor mentioned earlier gets. It doesn't seem like they tested stall torque though, so that's still a mystery with this design.
With this, they were able to achieve the 75mN.m/A that the frameless motor mentioned earlier gets. It doesn't seem like they tested stall torque though, so that's still a mystery with this design.A notable thing the mentioned is that overmoulding is not needed to prevent liquids from touching the coils. This is important in their application because this motor is for a fuel pump. It's important for Tetrinsic as it means that water resistance could still be on the cards.
One slight drawback they mention is that their motor needed to be slightly longer than the reference slotted motor, but that's not an issue in this application. I'm planning for a motor around 100mm in length.
STSPIN32G4, the chip that could do it all?

K(at)B had also suggested the STSPIN32G4, a 128KB flash chip that could potentially run everything from hall and FSR A/D conversions to BLDC FOC output in a 9x9mm package. As I've learned from creating the first Tetrinsic PCB, traces and vias are far from negligible in size, and thus multiple chips will take up more area than one larger chip.
I thought that the min supply voltage was a bit low, but I forgot that any BLDC controller would have its own resistance, and it seems it's in the range of entire ohms. Since power = voltage * current, and the max available is 1A, it means the power is directly proportional to the lowest voltage the motor can run with. If I aim for a 6V motor with a 1A peak, I'd need the phase resistance to be sub 4.4 ohms. The $32 motor would be driven at 10V (9.6V plus unaccounted-for resistive losses).
Conclusions
At the moment, the frameless motor solution is almost a solved problem, but the 16mm motor situation seems a bit shakier. However, I also have to keep in mind that the frameless motor would have cogging to an extent that some kind of algorithmic nullification would be needed.
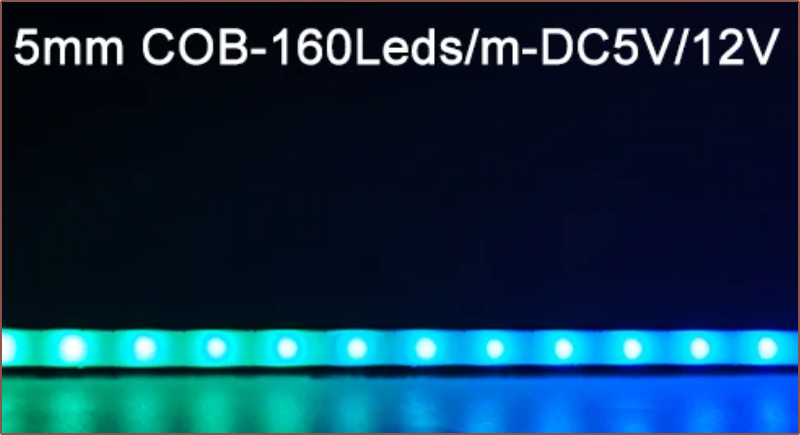
For Tetent, the idea using the frameless motor is to go back to the tightrope design, but this time CNC-mill a track (instead of trying to deal with tubes, printed parts and the flexible nature that arises from them) and then stick these nifty 160pixel/m LED strips on the underside:
Then, a LS032B7DD02, 3.16" MIP LCD would be used so that I get the cool animations whilst not sacrificing power (thus it's more likely to actually be kept on), especially in office-lit, window-lit or outdoor environments. The active area of the LCD is a bit shorter than I'd like, but I can just slope the inner walls so that the active length of the Tetrinsics (which is about 50 - 60mm) isn't reduced because of it.
I expect that a custom Tetrinsic would have to be designed for the thumb. If using the slotless strategy, the motor would be in the same orientation as the finger Tetrinsics (so no bevel gears needed), allowing for a hollow interior so that they can fit though. Because of this, it might make sense to try and keep any gear-train as close to 1:1 as possible.
For reading the motor orientation, I'm likey going to use a diametric magnet on the shaft and 2 hall effect sensors oriented 90 degrees, which seems to be the way it's done on 6V brushed motors with encoders:

At the moment, I can only imagine a solution for using the FSR for the slotless strategy since it can be placed directly under the belt and held in place with double-sided tape. Unlike the frameless strategy, I wouldn't need to counteract the force due to the weight of the track with a BMI160 accelerometer, nor would I need the 24-bit ADC. If the flash size isn't an issue, this whole project could potentially run out of the STSPIN32G4.
For these reasons, as well as more likely to allow for a solution for more projects ( #Tetent [gd0090], #Tetent UMPC [gd0149], #Itinervate [gd0151] ) and not just Tetent and #Tetrescent [gd0150], the slotless strategy feels more favourable than the frameless strategy.
In terms of commercial offerings, that one $32 motor is the most fine-tuned for this strategy. However, if I want to try for lower costs and power consumption (and thus heat dissipation), I'm going to need to research into iron laminations and rotor magnets to see if those are available at low cost. If they are, I may go down the path of a custom BLDC motor. I'm slightly more concerned about the iron laminations, as I probably could just stack shorter polepair magnets into a longer one. On the other hand, it seems that the reason why the iron is laminated is to reduce current losses. Perhaps it's possible to use a material where iron is suspended so that it increases magnetic permeability without being conductive, such as the "magnetic iron PLA" used in this 3D printed motor.
Power consumption with the 1.6ohms of the MOSFETs inside the STSPIN32G4, is expected to be the following:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.