Petar Crnjak
Petar Crnjak-
Programming guide for PAROL6
04/21/2024 at 09:35 • 0 comments -
PAROL6 setup video
04/14/2024 at 09:05 • 0 comments -
Video assembly guides
04/06/2024 at 17:02 • 0 comments -
Vacuum gripper for PAROL6
03/30/2024 at 13:04 • 0 comments -
Official forum for PAROL6
03/23/2024 at 11:30 • 0 commentsJoin forum: https://discourse.source-robotics.com
-
Happy holidays from PAROL6!
12/24/2023 at 10:56 • 0 comments -
Beta batch of PAROL6 PCBS
10/09/2023 at 14:19 • 0 commentsIf you are interested in the beta batch of PCBS sign up here:
https://forms.gle/sZqHVLPoMJxuVAyJ9If you are interested in buying PAROL6 as a kit, fully assembled robot, or just a gripper sign up here:
https://forms.gle/XkSvStwnQxw1f8xL8 -
30 more PAROL6 robots coming soon!
09/28/2023 at 10:57 • 0 comments![]()
-
Robot testing code!
09/27/2023 at 07:32 • 0 commentsTo test PAROL6 control board connection to your robot you can use stock software or use testing software. Testing software is more safe and interactive for users. It can be found at github. Once you flash your PAROL6 control board testing will start.
Stepper drivers test
The code will try to communicate with stepper drivers. Output1 and Output will go from high to low every 1s and LED1 and LED2 will flasg. If everything is okay you will get output like this on serial:
![]()
If the stepper driver is faulty or not connected you will get:
![]()
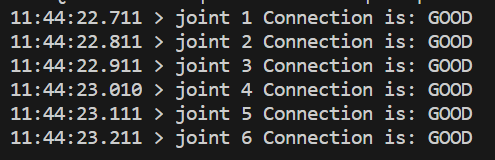
If stepper drivers are good your stepper motors should spin at a low speed using moderate current of 200-300 mA.
Flash memory test
In the serial terminal write # FLASH and press enter. You should get an output like this for a successful test.
![]()
LIMIT test
In serial terminal write # LIMIT and press enter. You should get a output like this if you activate the switch.
![]()
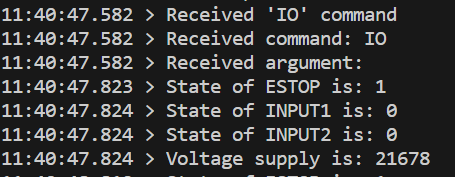
IO
In serial terminal write # IO and press enter. You should get an output like this:
![]()
If you change the state of ESTOP, INPUT1 or INPUT2 you will see states changing. You will also be able to see the voltage of your power supply in mV!
-
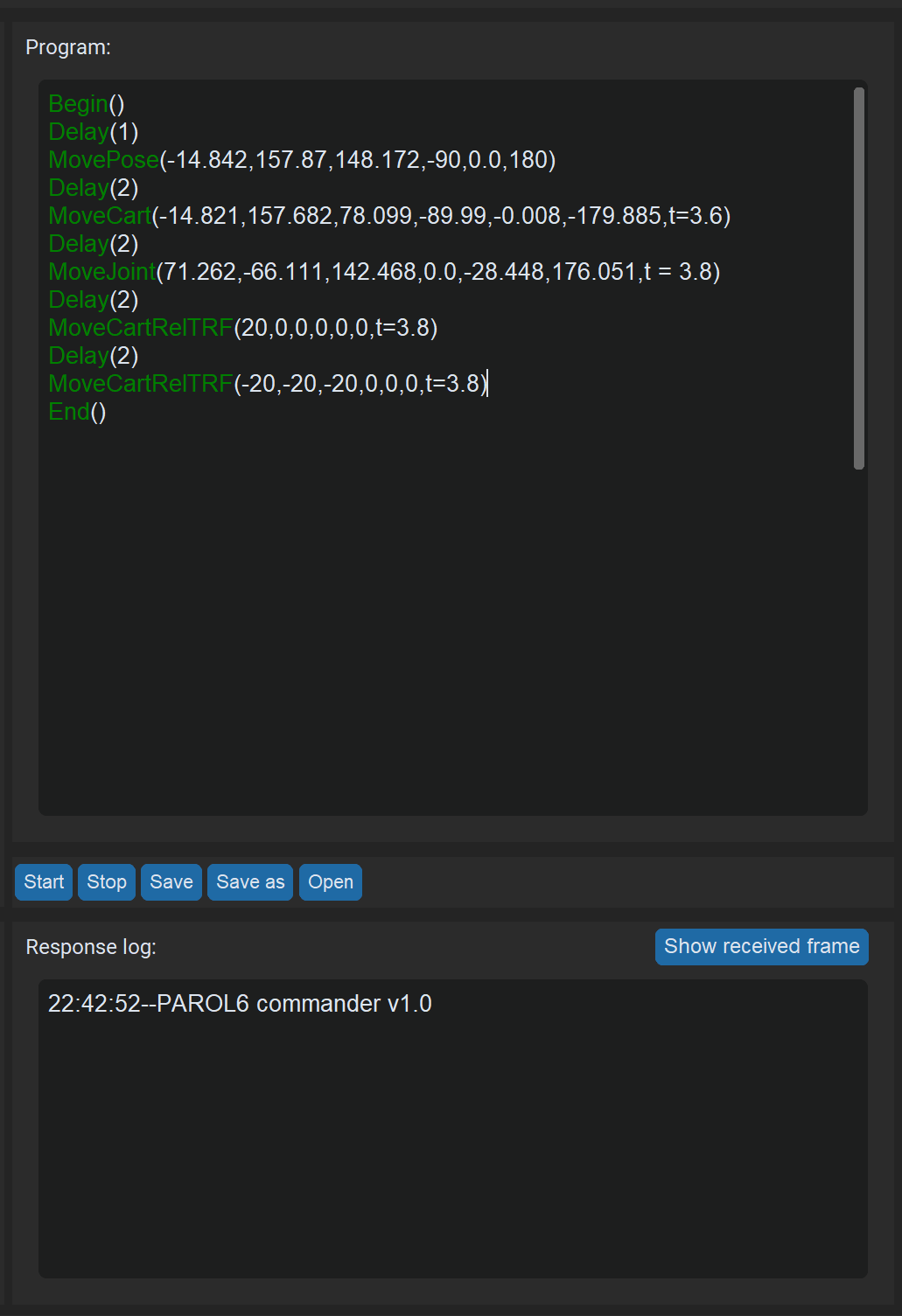
Trajectory follow and script language RBTscript
09/16/2023 at 21:01 • 0 commentsPAROL6 commander software allows you to write simple robot arm scripts. The scripting language is called RBTscript. It allows you to move the robot in joint space or cartesian space, use delay functions, control outputs, grippers, read inputs, and much more!
![]()
How are trajectories tracked?
Once the program starts it needs to generate and track commanded trajectories.
There are 2 ways we can command robots' trajectory here:
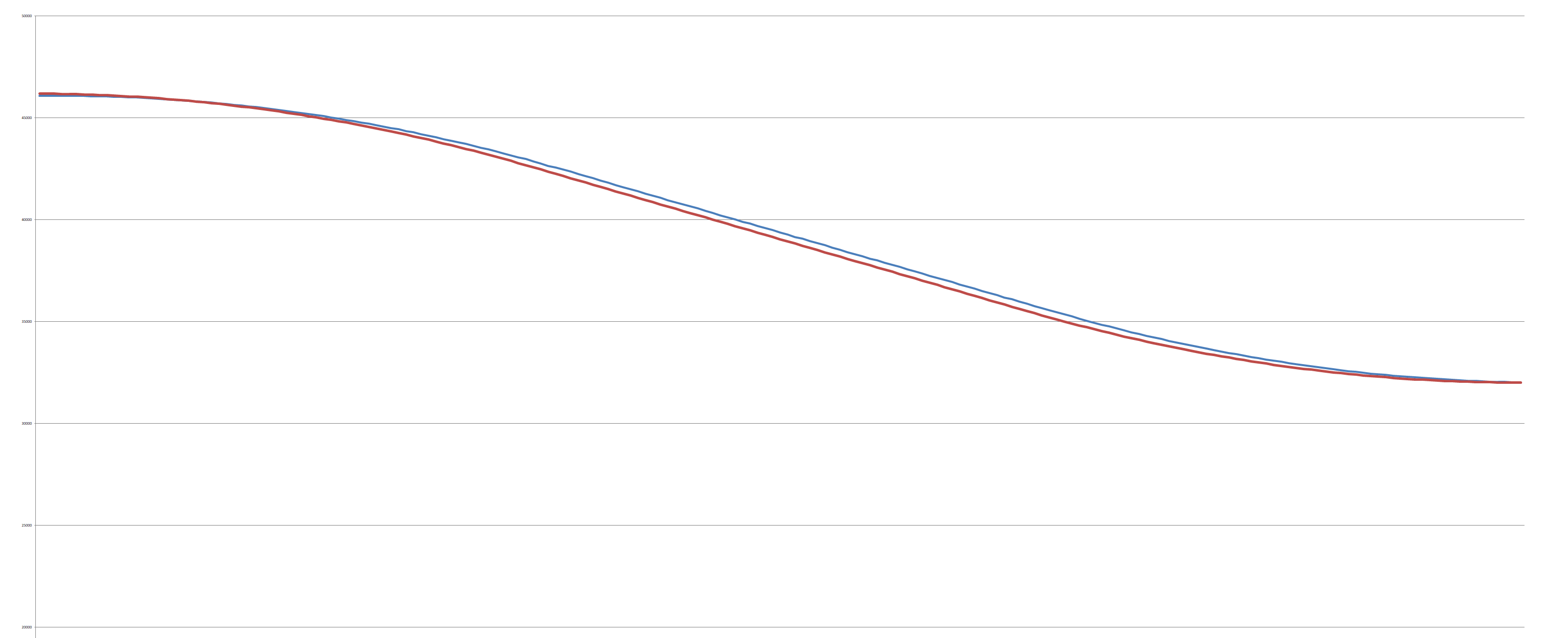
For example, we want joint 6 to move from 260 deg to 180 degrees. We want to follow trap velocity profile and get to 260 position in 2 seconds. We generated speed and position curves.
Now if we command only the speed curve robot will follow it perfectly but if the move is too long or too fast it will miss the demanded position. Why? We are sending commands every 10 ms. but it is not always exactly 10 ms since pc is not a real-time machine that time fluctuates. another thing is that steppers execute some really small speed moves from the beginning and the ends of the speed curve. Because of that position is missed usually. How to compensate for that? Use position curve. Use your current position and commanded position and calculate how fast you need to go. After that take that speed and add commanded speed and average that.![]()
![]()
PAROL6 - Desktop robotic arm
A robot that can be used as desktop tool for small automation and education!