 Mirko
MirkoThe Problem
The challenge of accurately monitoring river water levels is unsolved in many places. Current methods are often manual, time-consuming, and prone to inaccuracies due to factors such as weather and human error. Openthing 3 RiverWatch provides low-cost but accurate water level measurements that enable timely flood forecasting, effective water management, and improved environmental monitoring.
The Solution
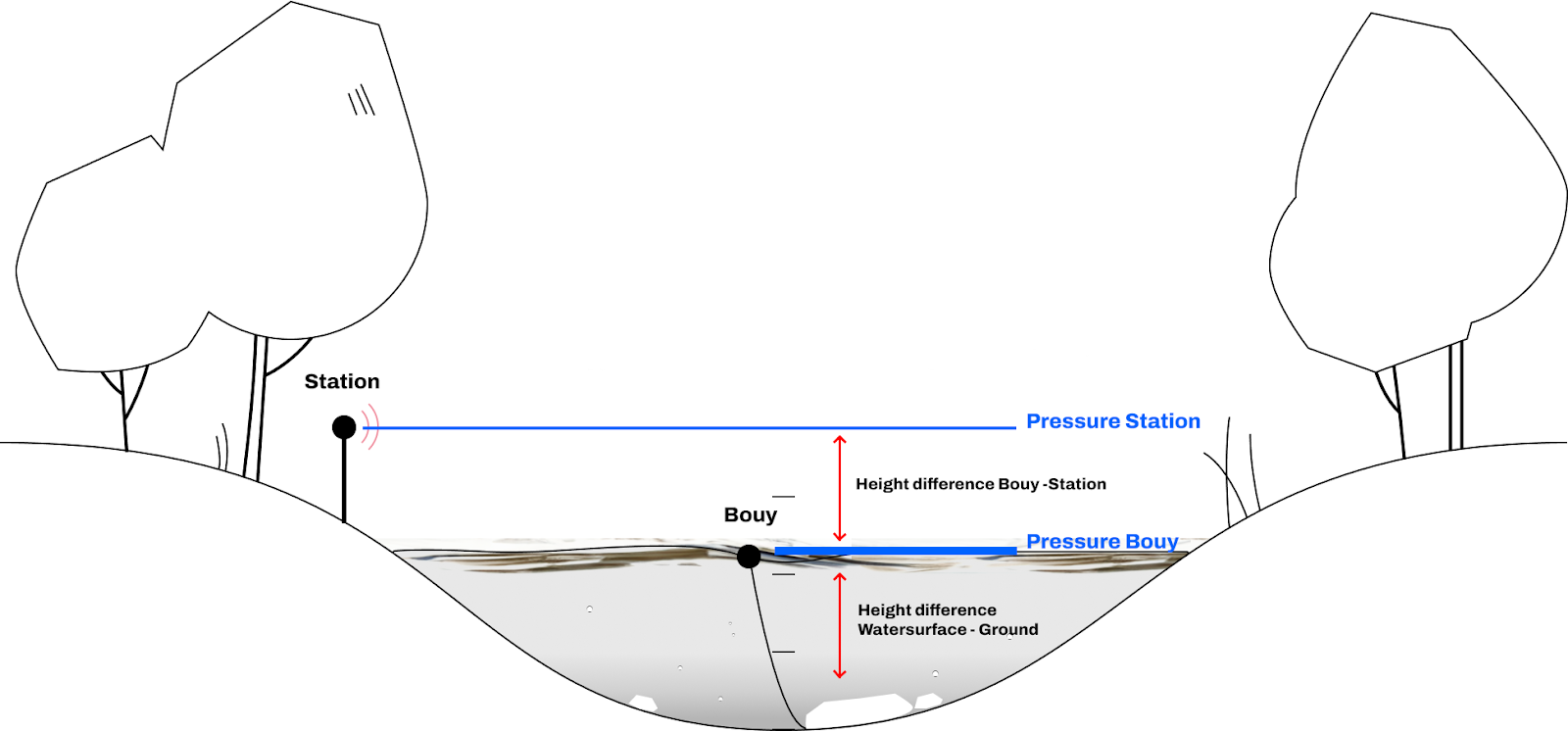
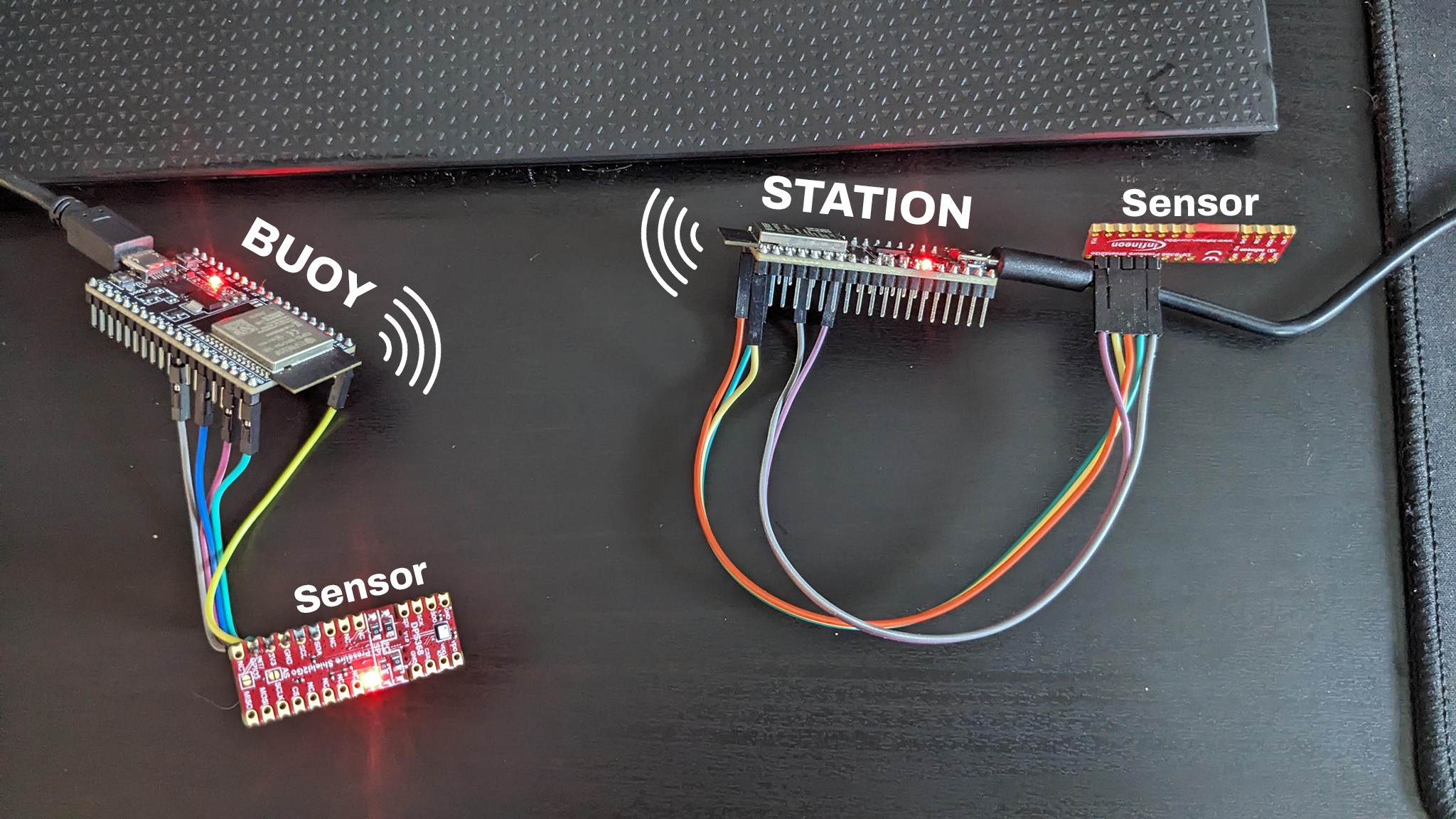
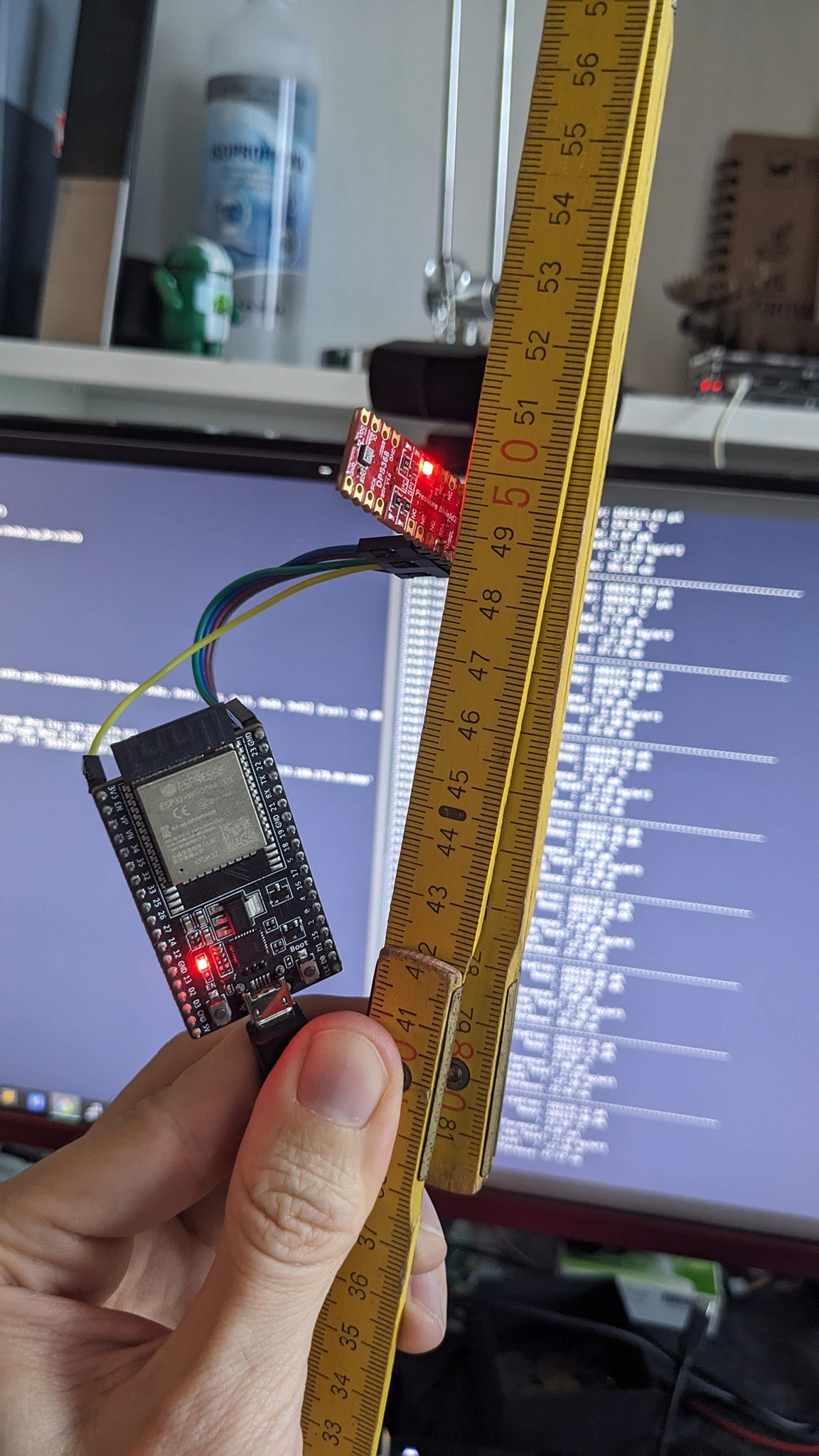
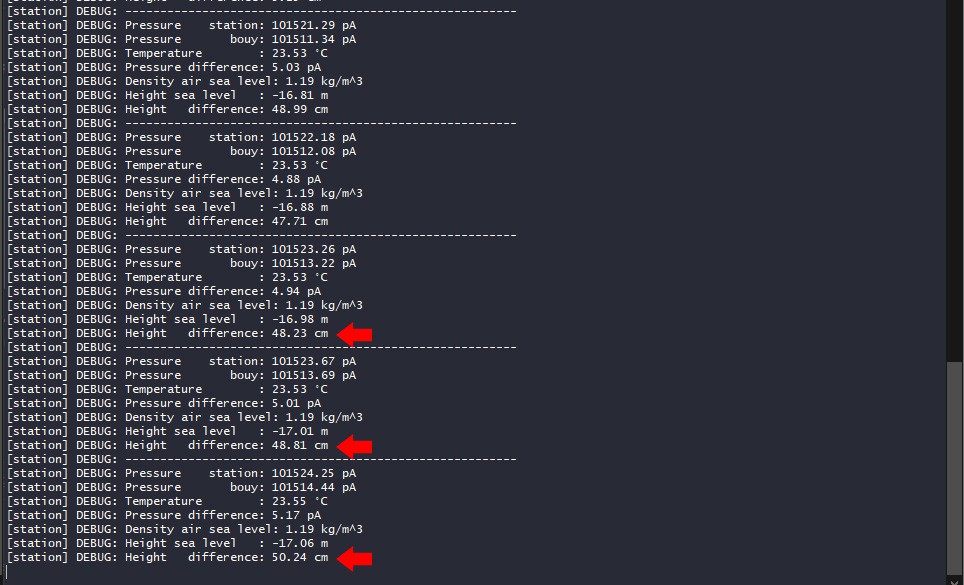
The idea of this concept is to use a solution with two pressure sensors to measure the water level in the river. The first sensor, a stationary sensor, is calibrated to accurately measure atmospheric pressure at a fixed height above the water surface. This sensor provides a high-precision reference point.
The second sensor, which acts as a buoy, floats on the water surface and is also calibrated to measure atmospheric pressure at the height of the water level. This sensor is intended to provide reliable measurements in the same accuracy range as the stationary sensor.
By using the calibrated pressure sensors and taking into account the known accuracy range, this solution enables the calculation of the water level in the river with high precision.
Technical Details
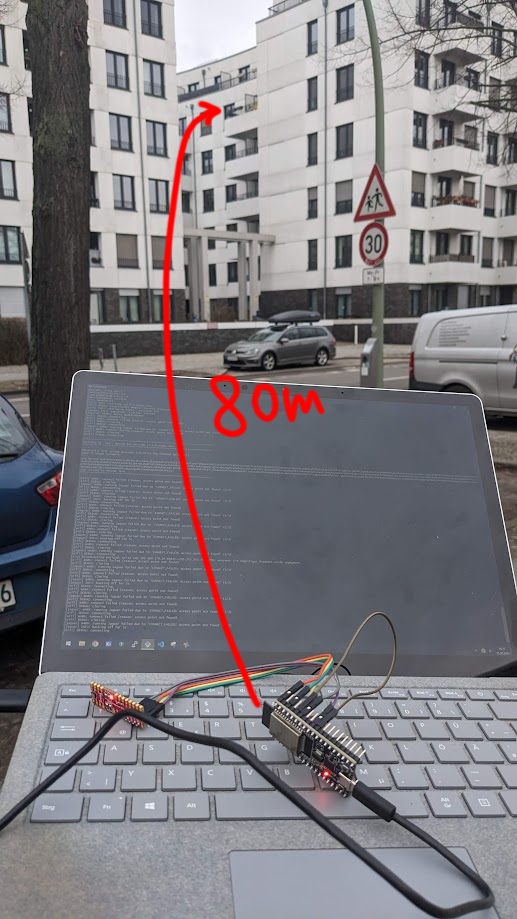
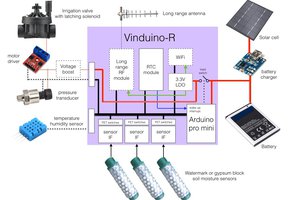
With BLE Long Range this solution can reach a area of about 200-300m (in theory so far). Both BLE Devices will be synched by time and wakeup at the same time. Then the Bouy will send its measurements to the station which then keep the data as a data logger device.
The station can come in various forms like a plain data logger which can log the data onto an SD card or just keep it and is transfered to a smartphone manually at any point. As well as a internet device which gets access to the internet via LTE or NBIoT to send its data.
 Reinier van der Lee
Reinier van der Lee
 Rohan Menon
Rohan Menon
 Brian Wyld
Brian Wyld
 YJ
YJ