anfroholic
anfroholic-
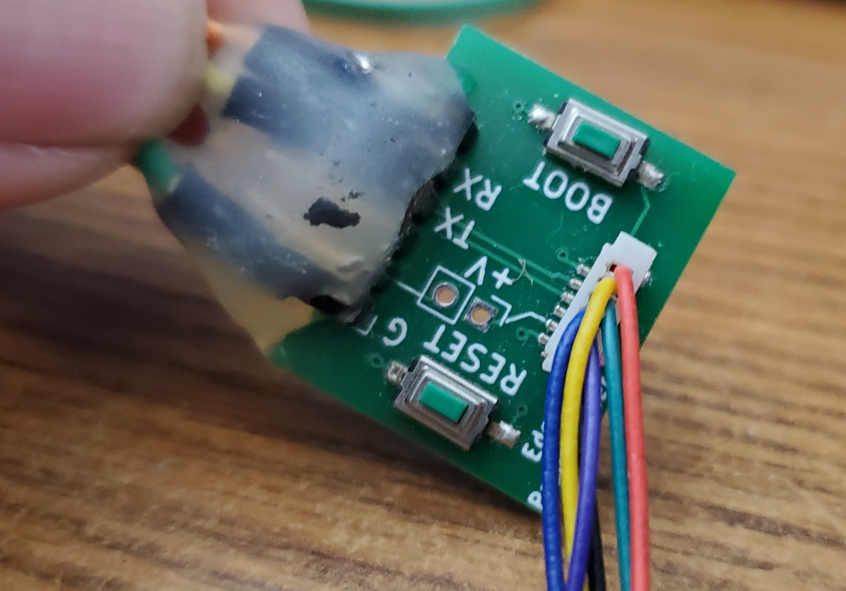
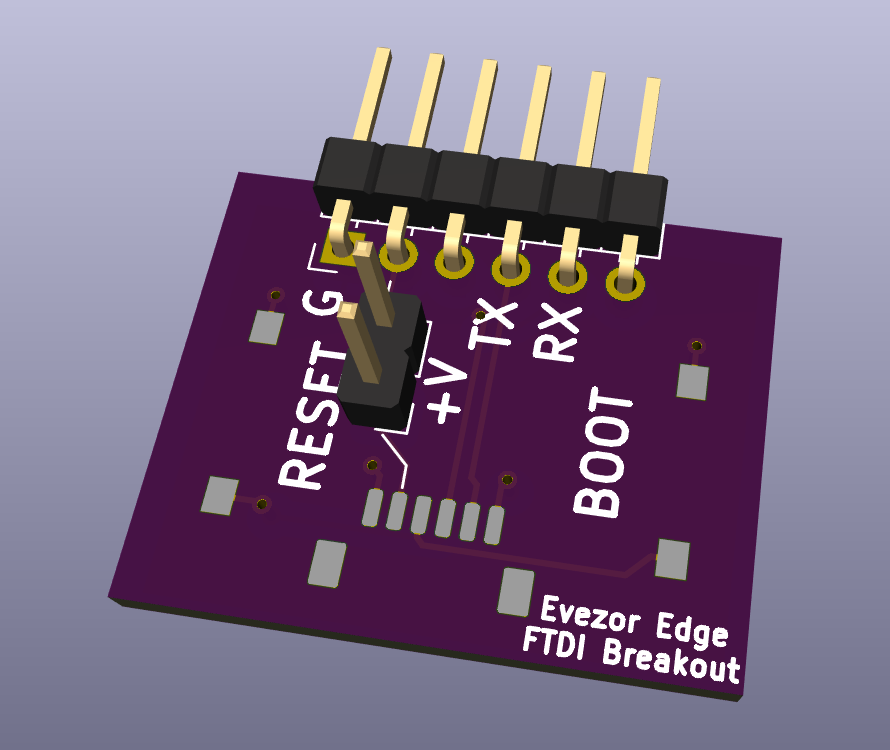
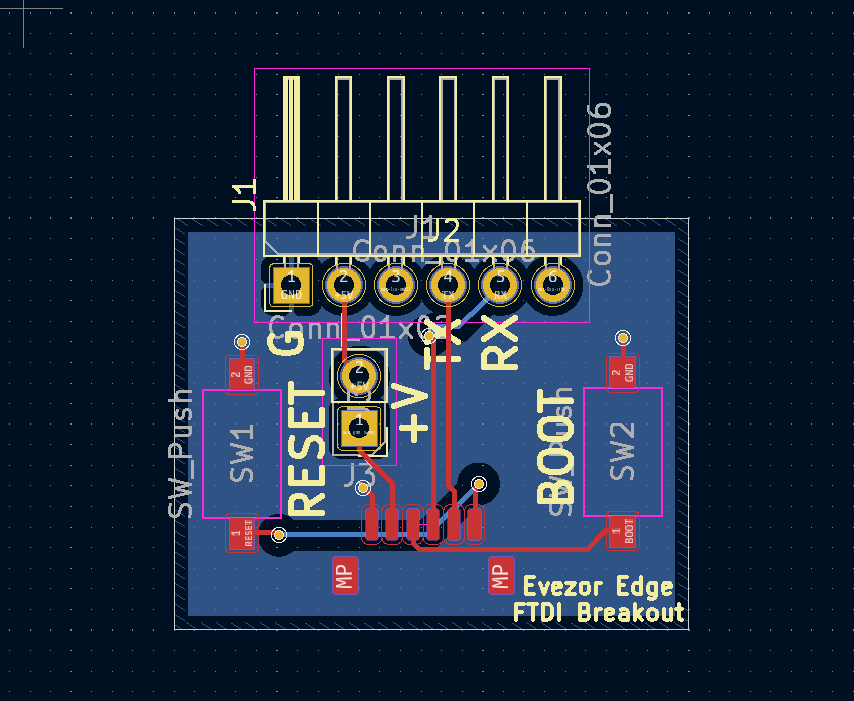
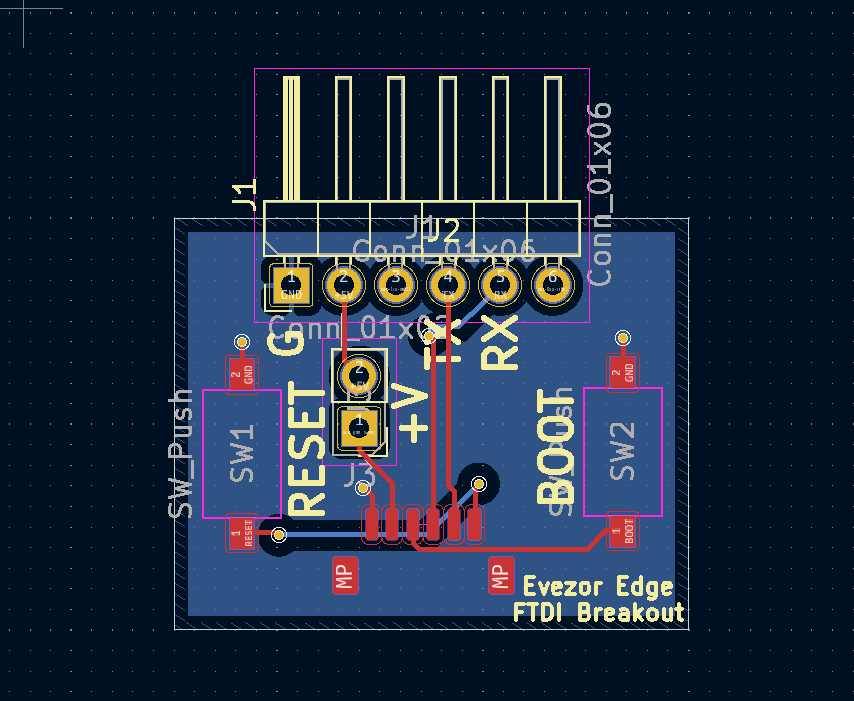
Day 30: evezor_edgeboard_ftdi_breakout
10/15/2023 at 12:33 • 0 commentsThis board uses the standard 6-pin JST-SH connector and breaks out the rx and tx pins and adds 2 bottons for reset and boot pins.
Source files can be found here: https://github.com/evezor/evezor_edgeboard_ftdi_breakout
![]()
![]()
![]()
![]()
![]()
-
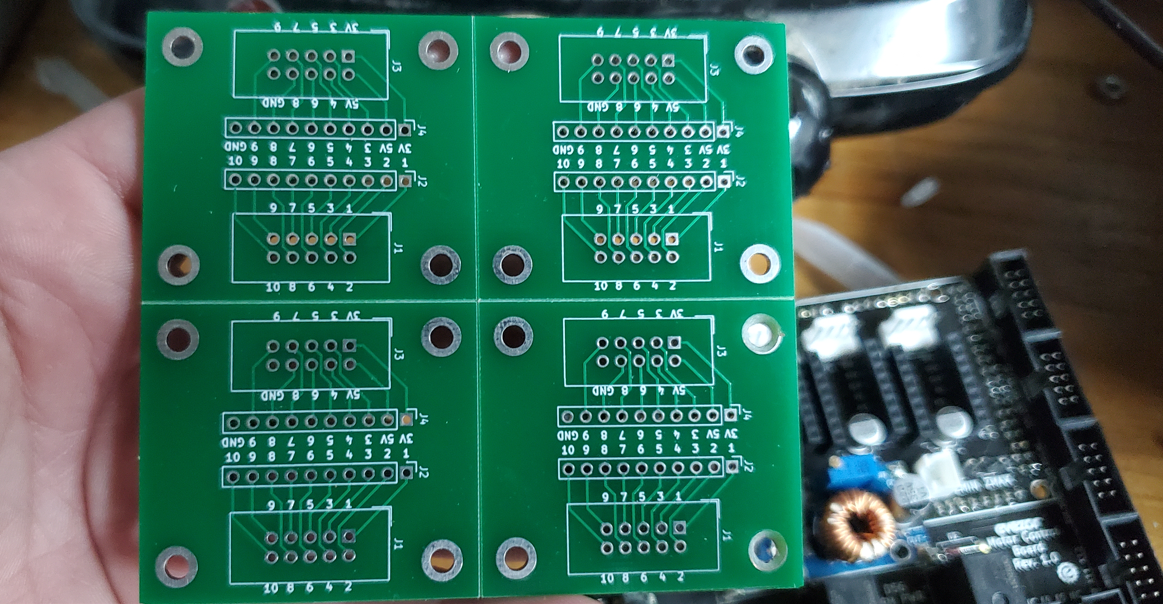
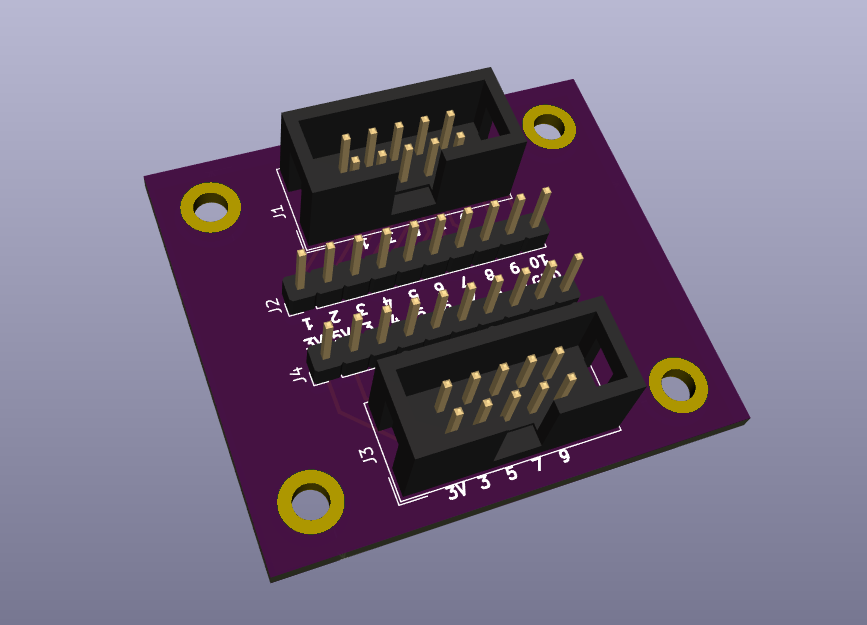
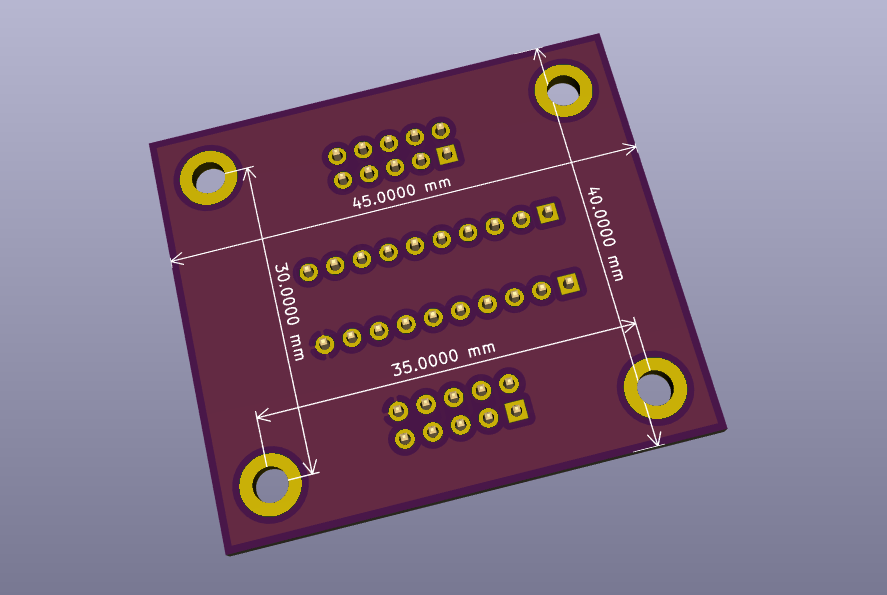
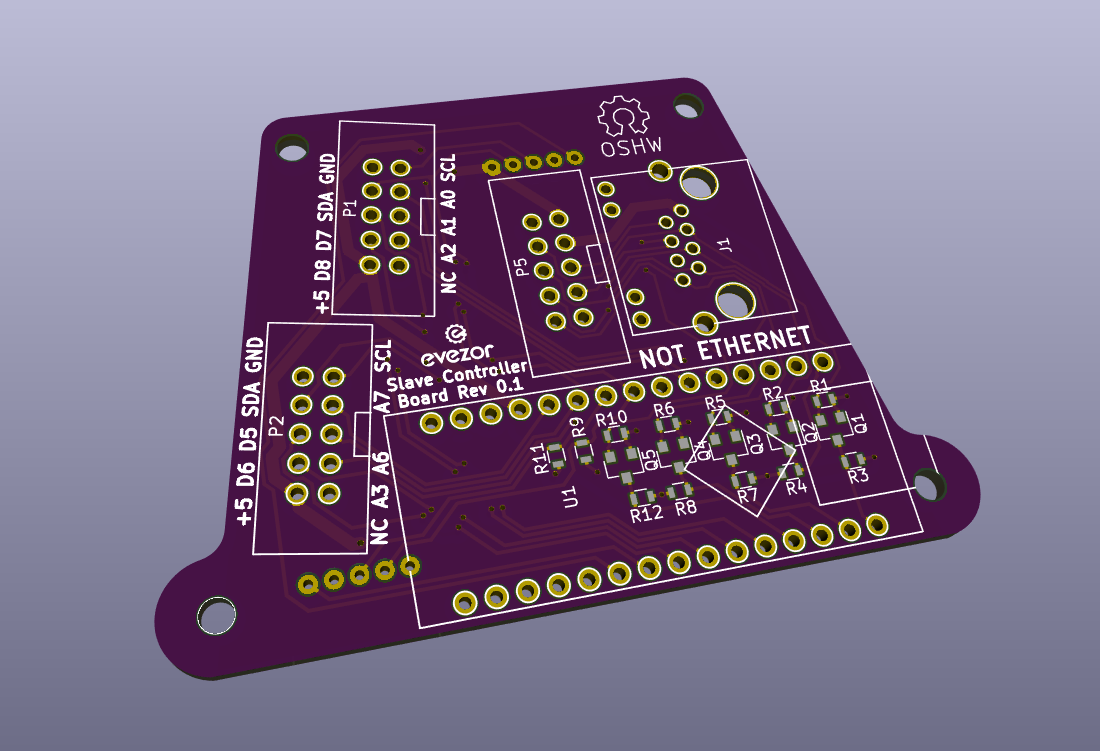
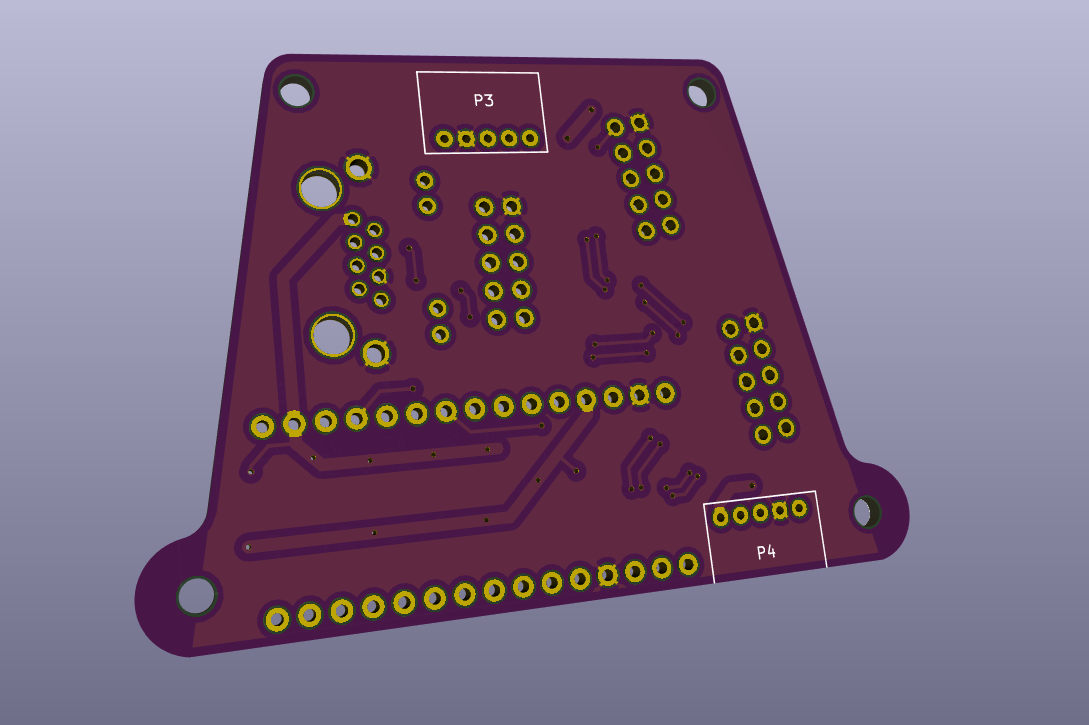
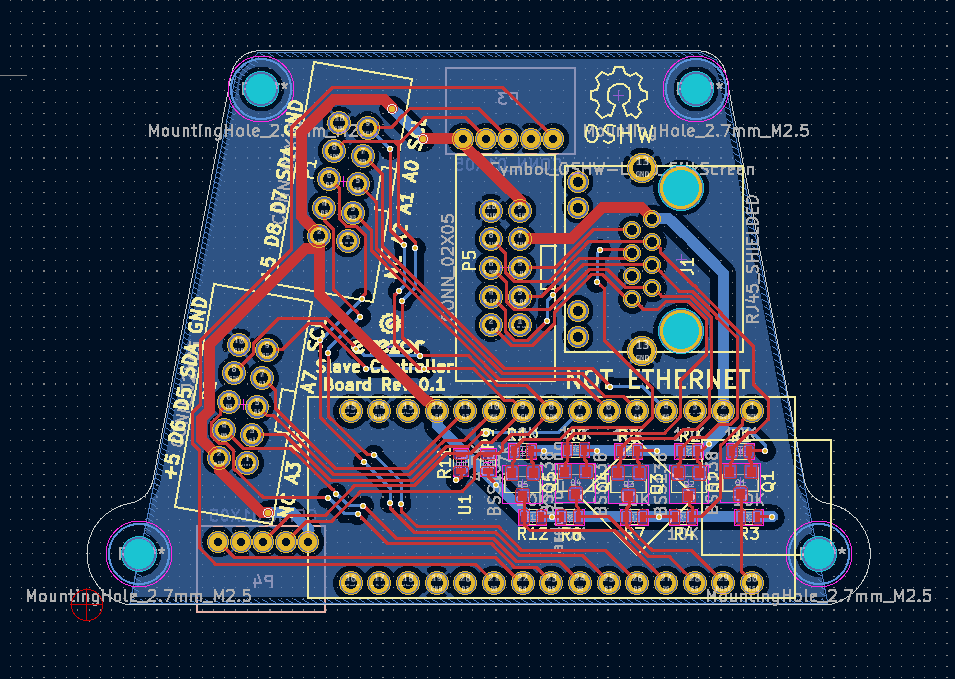
Day 29: evezor_arm_v1_idc_regiggerer
10/13/2023 at 12:39 • 0 commentsThis boards incorporates two gadgeteer ports intended to work with the other devices in this ecosystem. I originally created this board as a way to remap pins. And using this thing I decided that I hated everything about systems like the gadgeteer standard, pmod, shields, hats, and many of the other systems that intend to create a reusable set of standards among controllers and devices. But inevitably you run into issues like, this pin does not have pwm and I want it to. Or this pin does not have pullups or can only be used as an input and on and on. Secondly, when you end up going through these mappings your code and schematics begin to look just as ugly and trying to trace down issues when you want to change or diagnose things you must again untangle all these mappings. No more! I threw all these boards in the trash and have no intention of looking back. It's a noble goal to try and create some kind of standards for breaking out pins and I will continue to create and use them, but attempting to have a paradigm like this as the foundation is untenable and was part of the inspiration for the larger Evezor edge board concept.
Source files for this board can be found here: https://github.com/evezor/evezor_arm_v1_idc_regiggerer
![]()
![]()
![]()
![]()
-
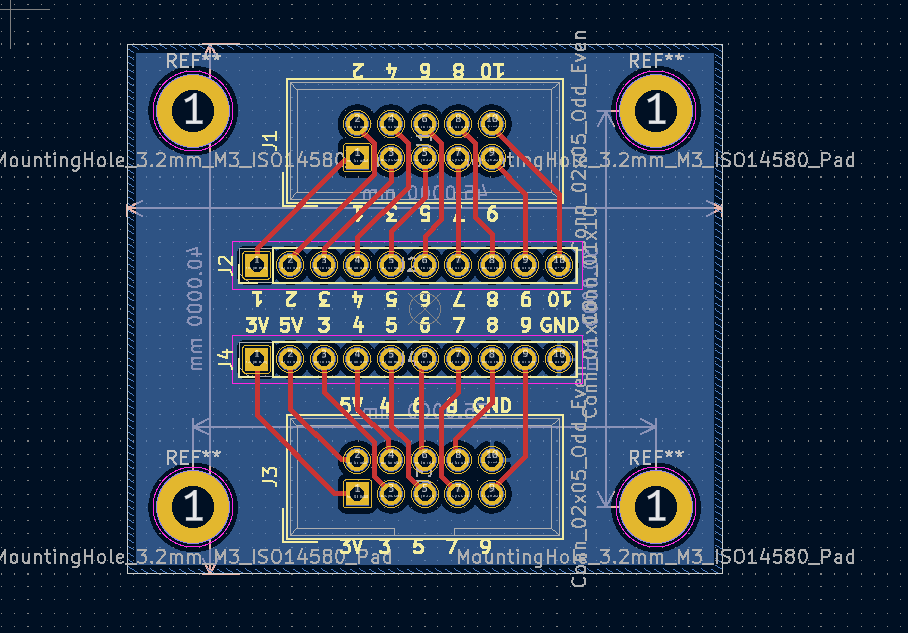
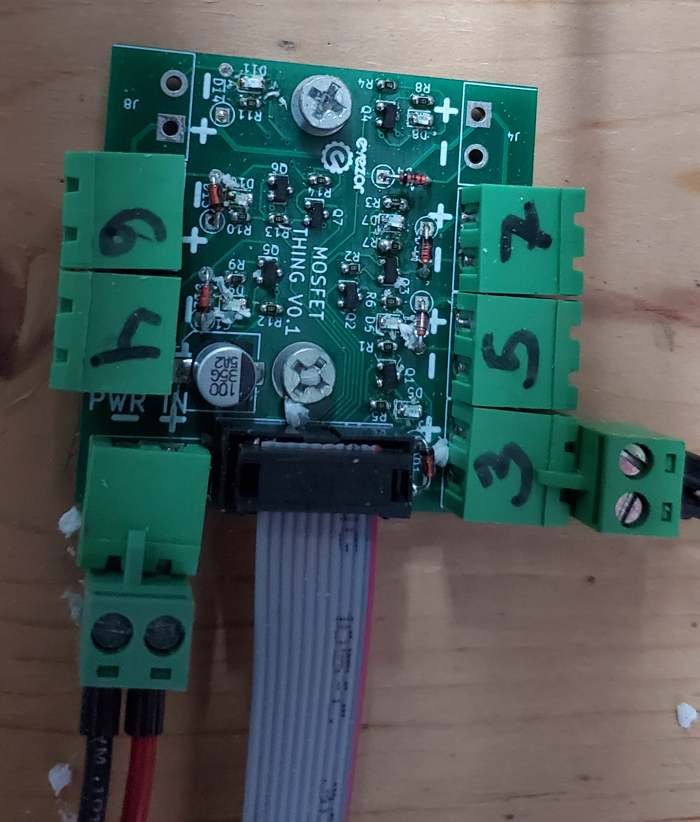
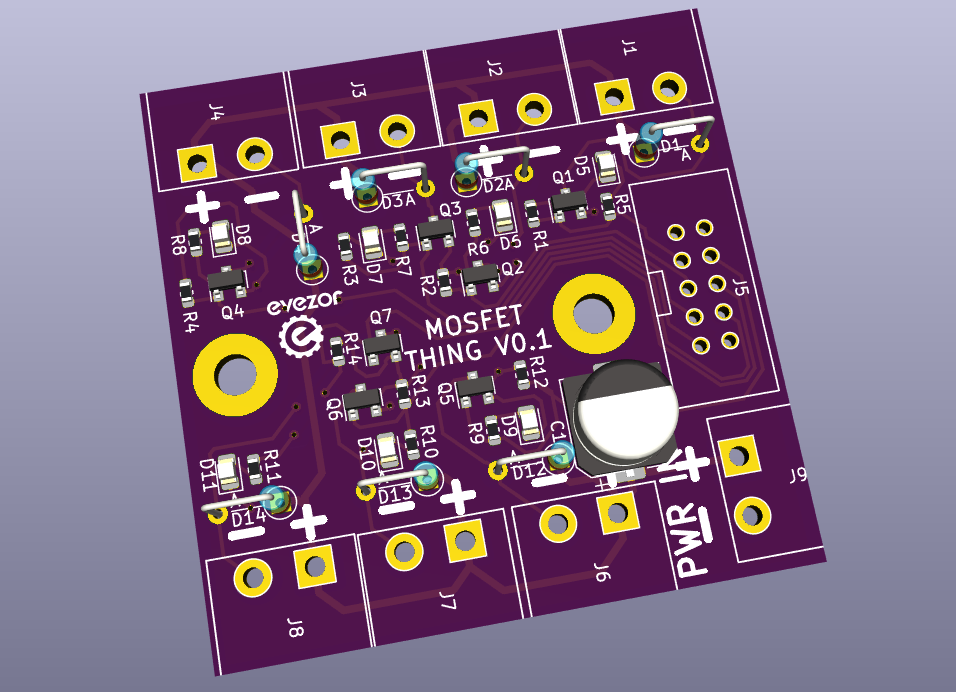
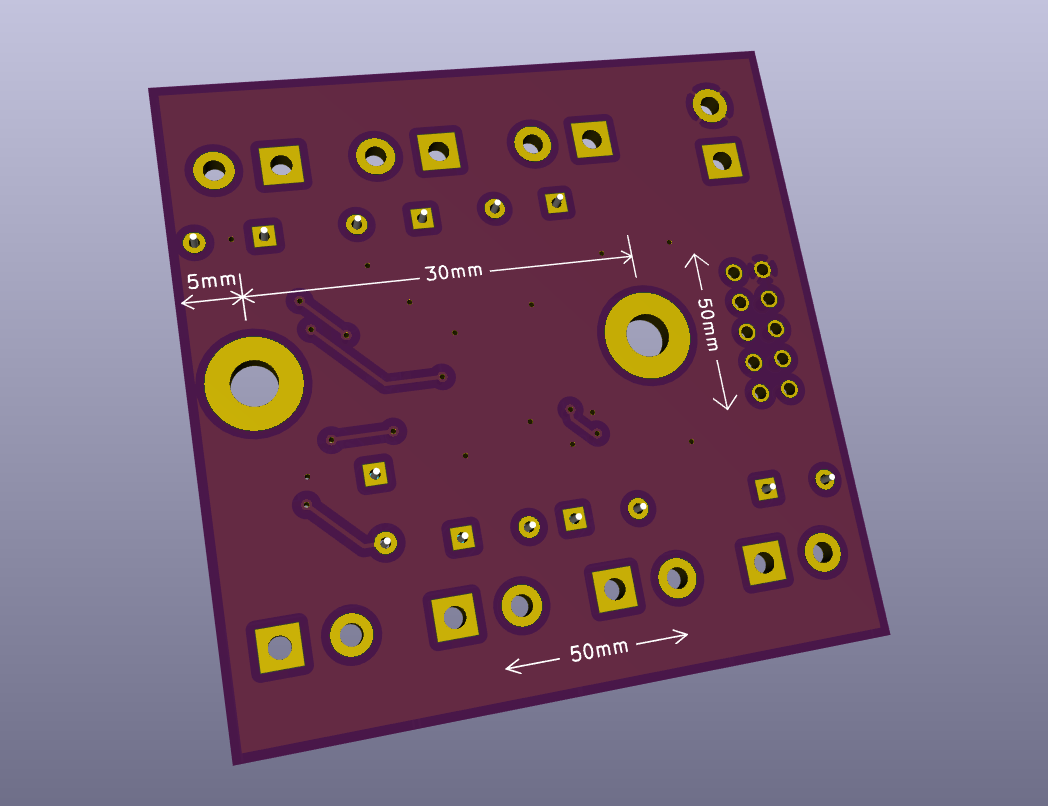
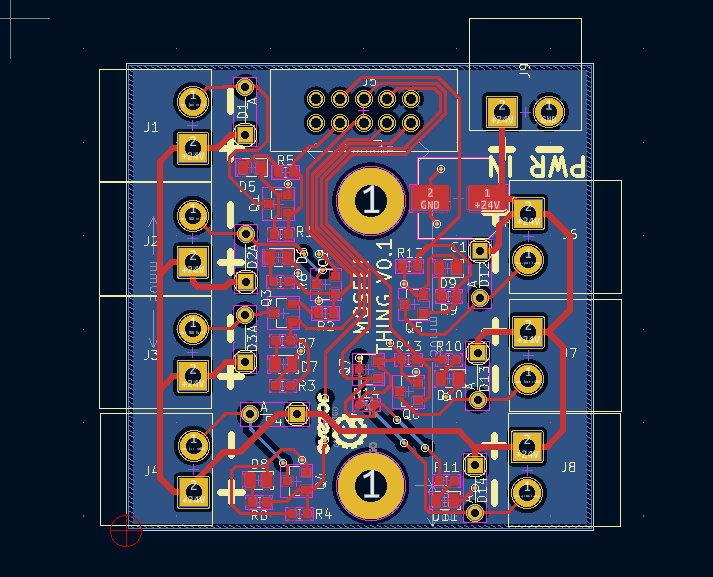
Day 28: evezor_arm_v1_mosfet_thing
10/12/2023 at 06:58 • 0 commentsThis board has a few mosfets intended to be used for relays, small fans, lights and other small loads.
It incorporates a gadgeteer port to work with the mainboard who's source can be found here: https://github.com/evezor/evezor_arm_v1_mainboard_V2
The source files for this board can be found here: https://github.com/evezor/evezor_arm_v1_mosfet_thing
![]()
![]()
![]()
![]()
-
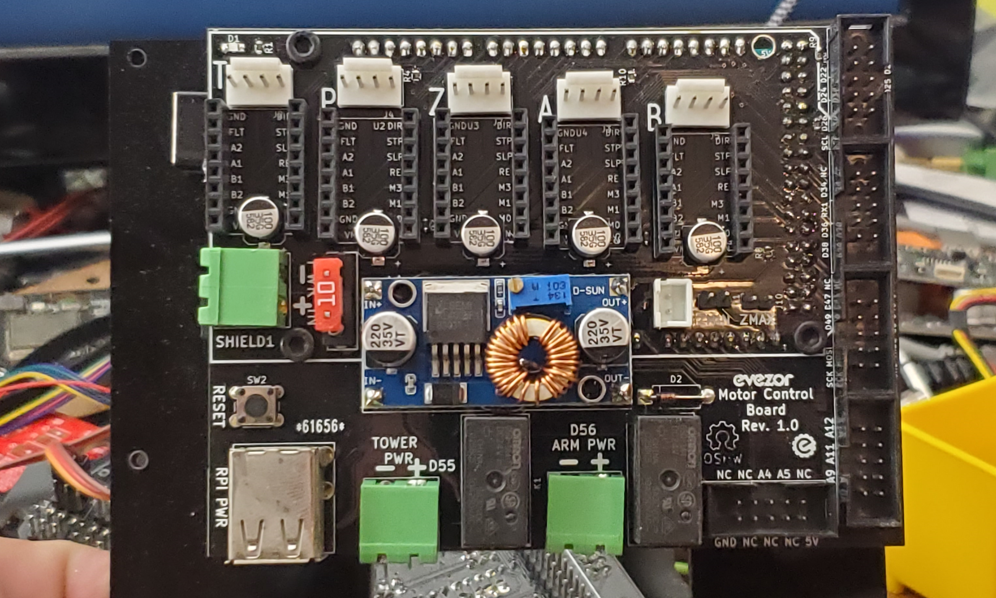
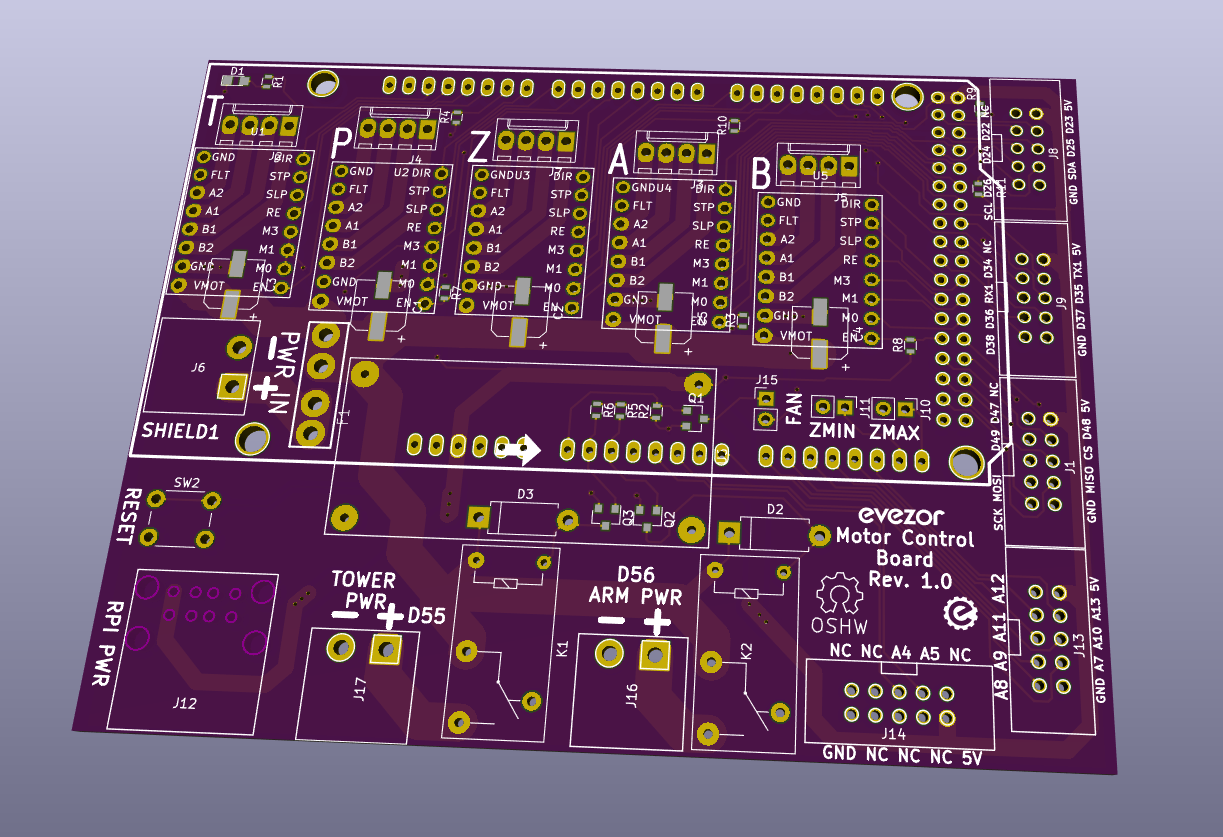
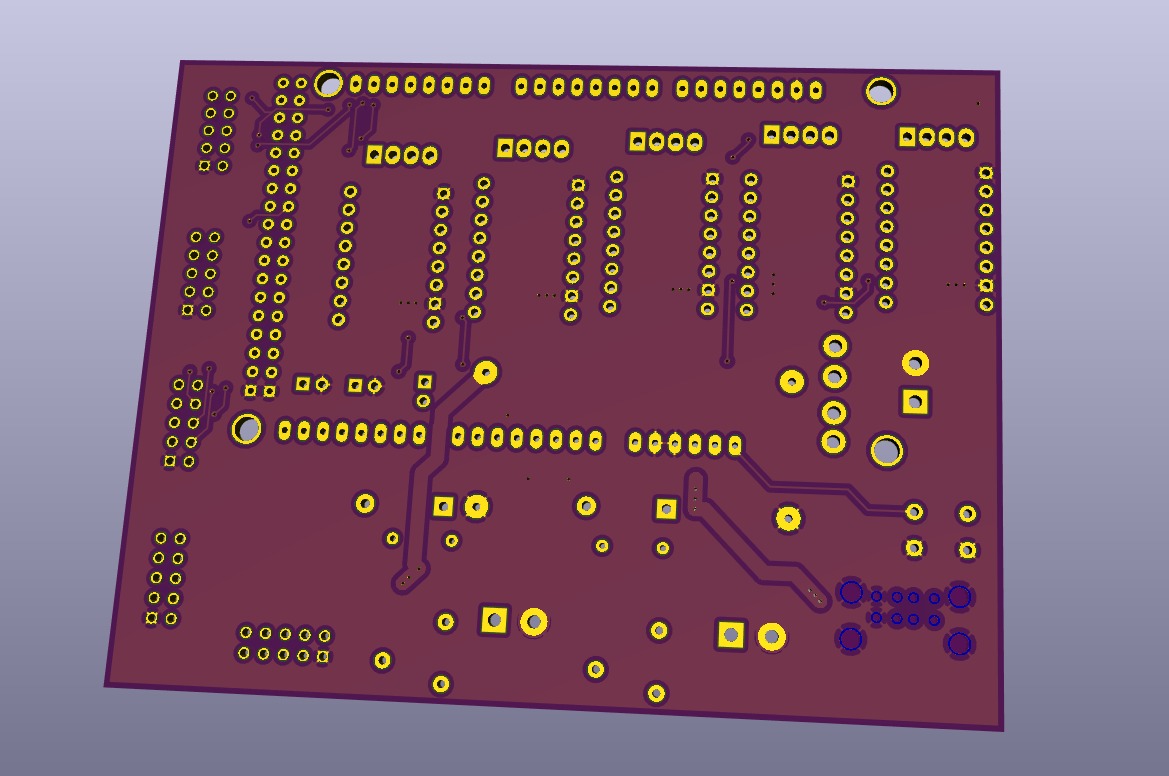
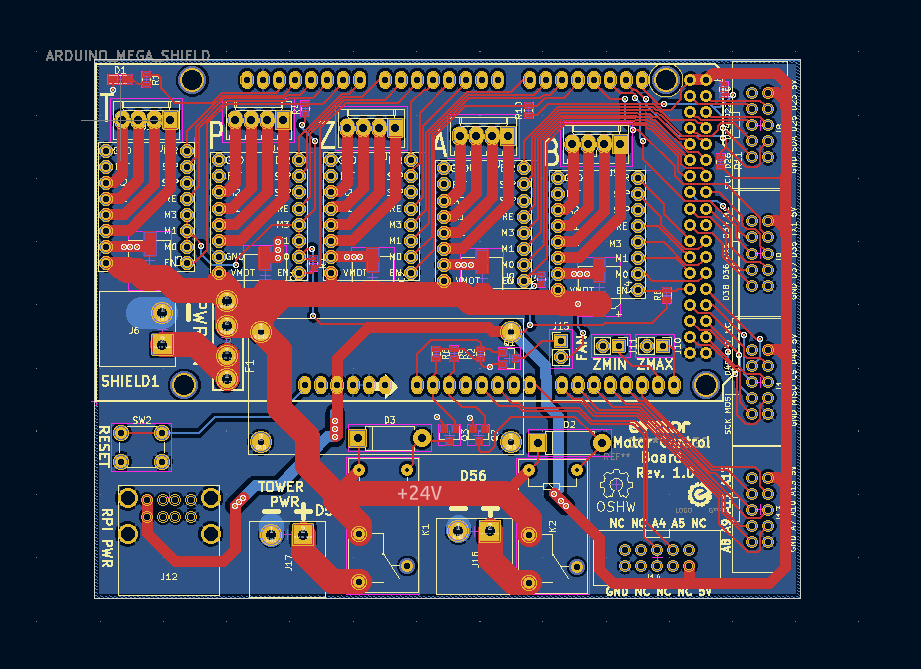
Day 27: evezor_arm_v1_mainboard_V2
10/11/2023 at 10:07 • 0 commentsThis is the second iteration of the mainboard. The first version can be found here: https://github.com/evezor/evezor_arm_v1_mainboard_V1
This board retains the Molex KK connectors for the stepper motors and the gadgeteer ports for expansion.
This version also incorportates a stepdown voltage converter, a power relay and a pair of USB-A ports inteded for powering a raspberry pi and a screen.
Source files can be found here: https://github.com/evezor/evezor_arm_v1_mainboard_V2
![]()
![]()
![]()
![]()
![]()
-
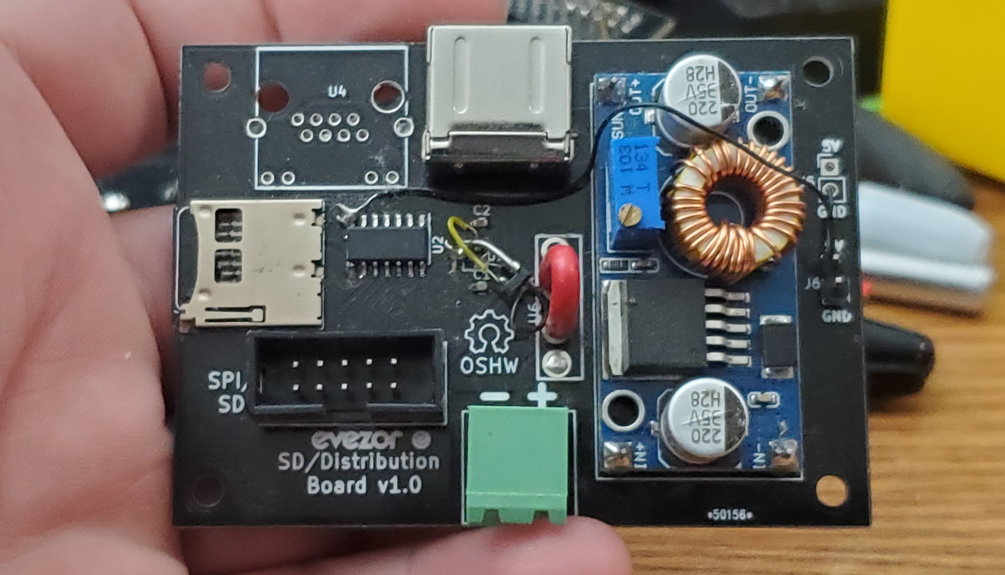
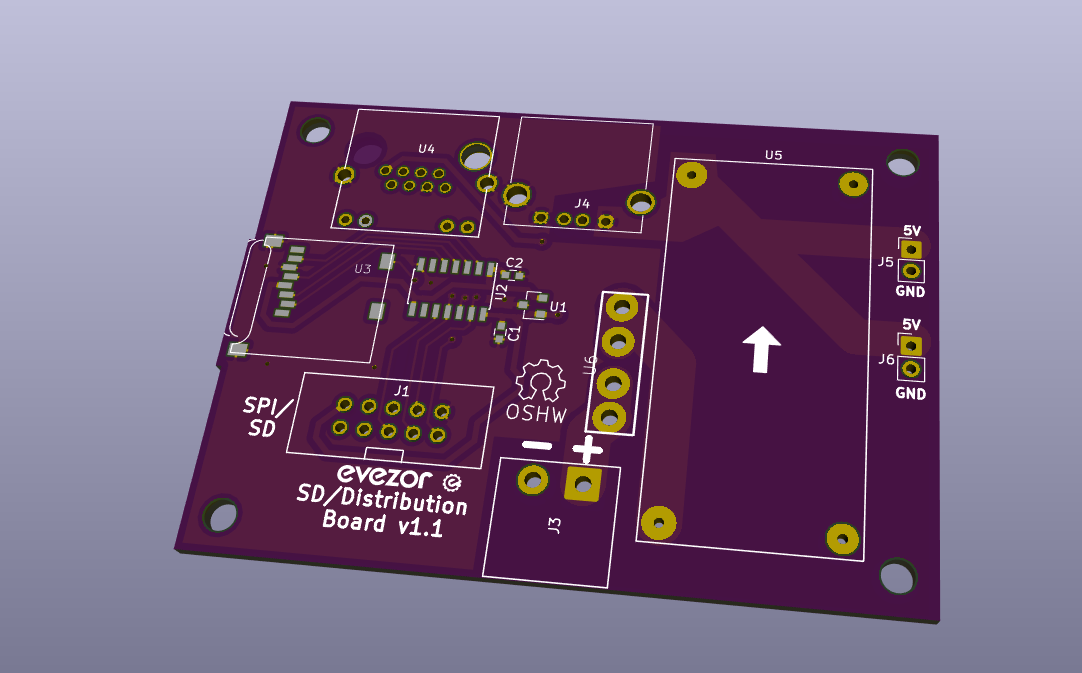
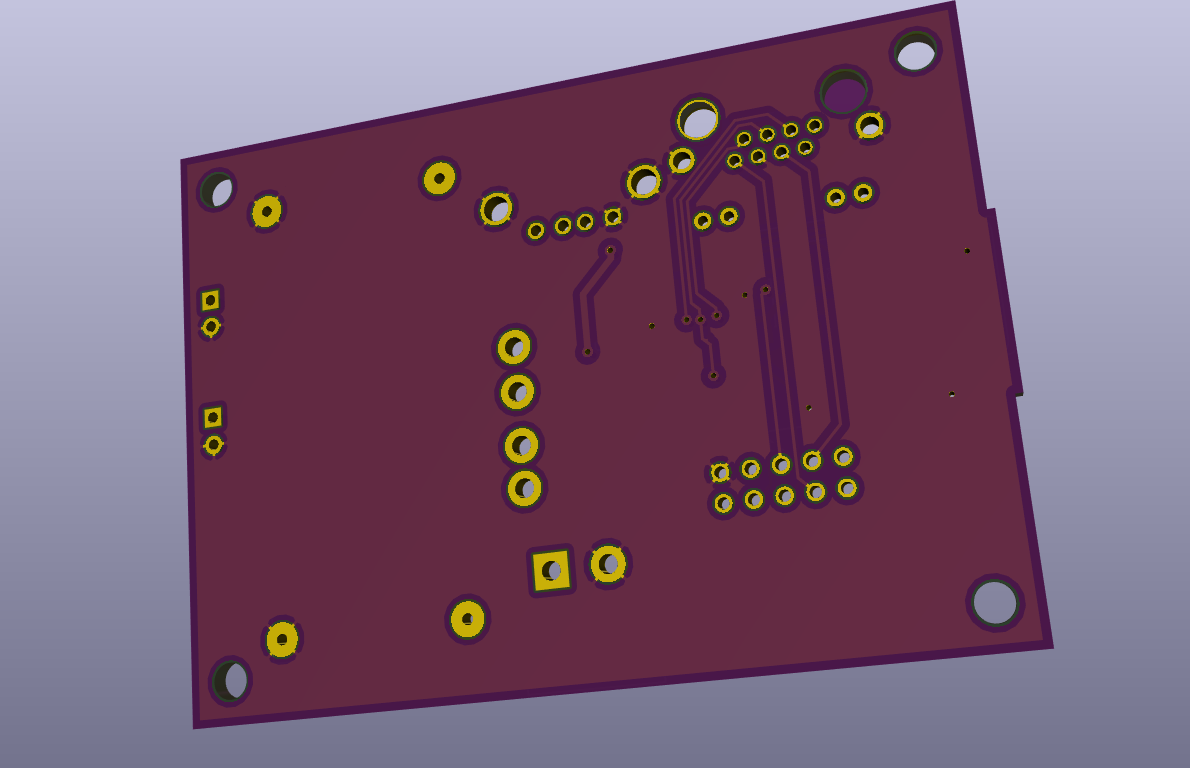
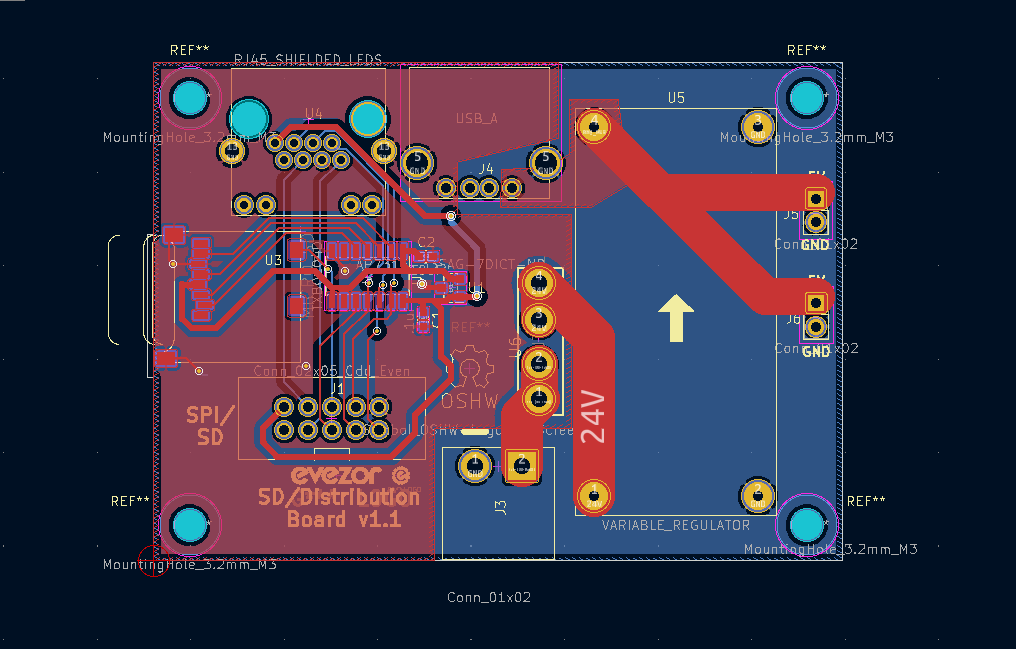
Day 26: evezor_arm_v1_spi_power_board
10/09/2023 at 04:12 • 0 commentsThis board is inteded to be used with the evezor_arm_v1_mainboard_V1 https://github.com/evezor/evezor_arm_v1_mainboard_V1
It adds a power input for all 5V needs, it adds an sd card and associated ciruitry and an rj45 port that connects to the arm nano board
Source files can be found here: https://github.com/evezor/evezor_arm_v1_spi_power_board
![]()
![]()
![]()
![]()
-
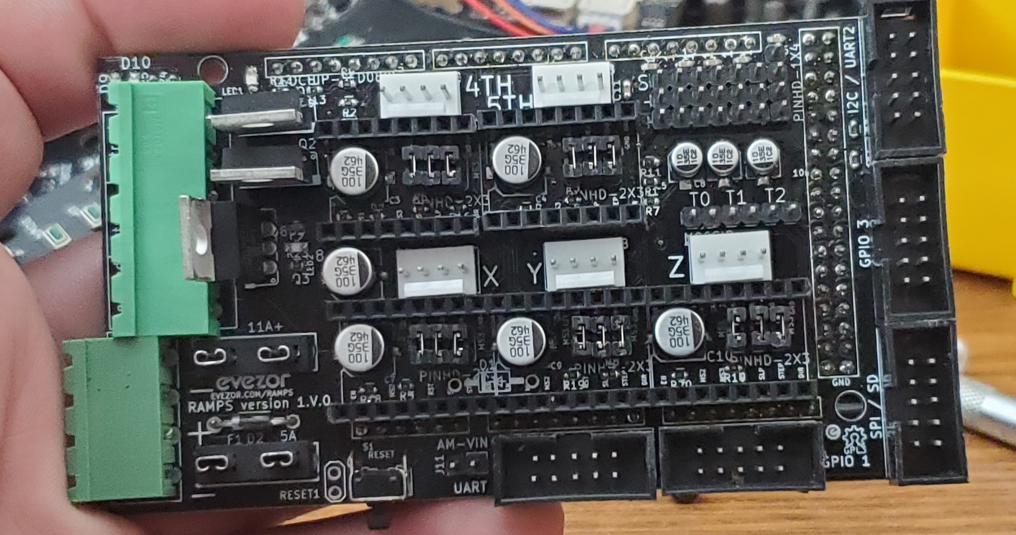
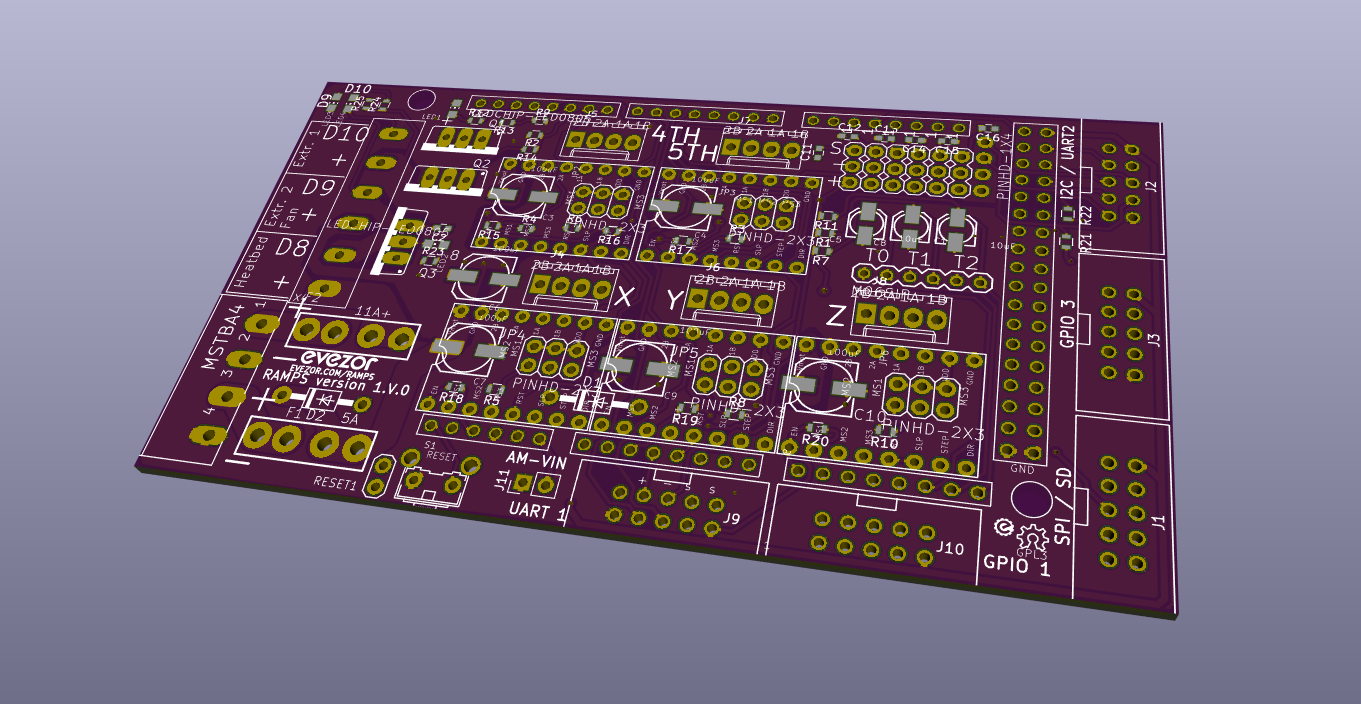
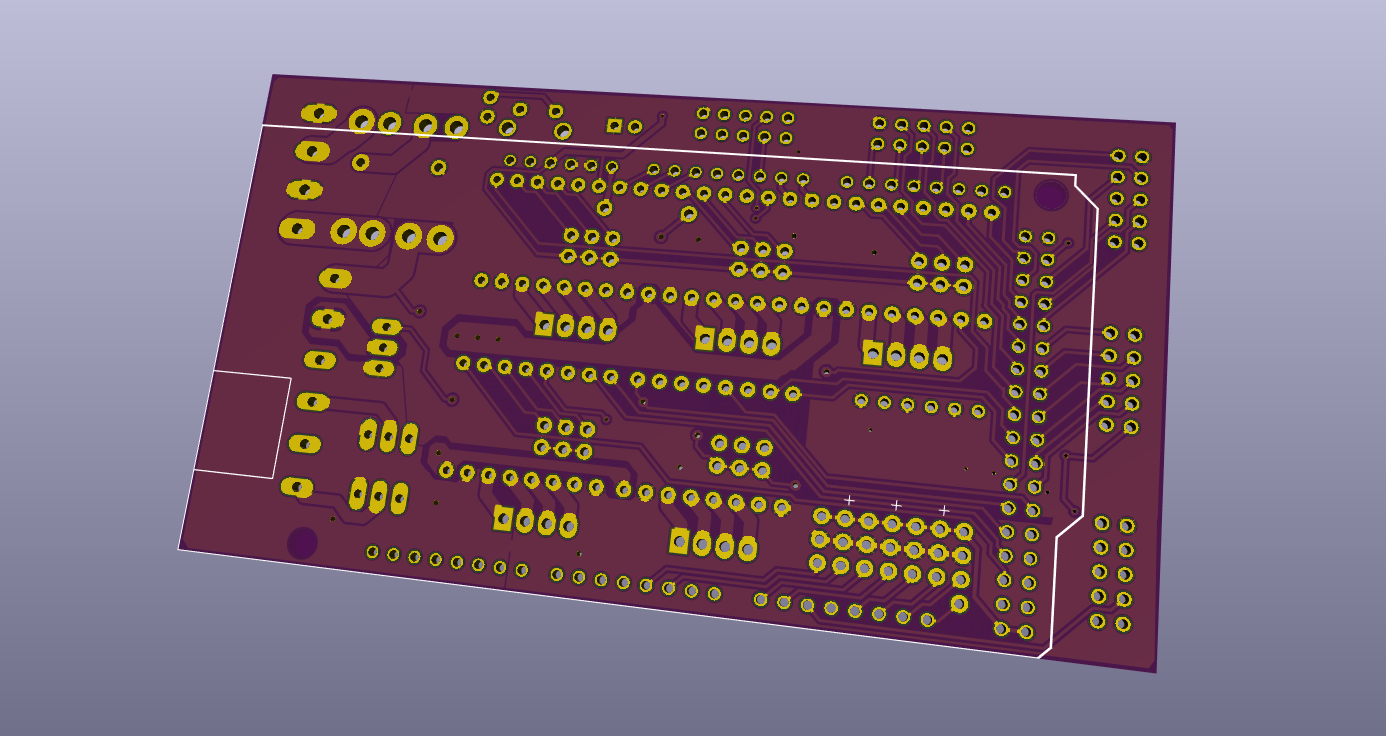
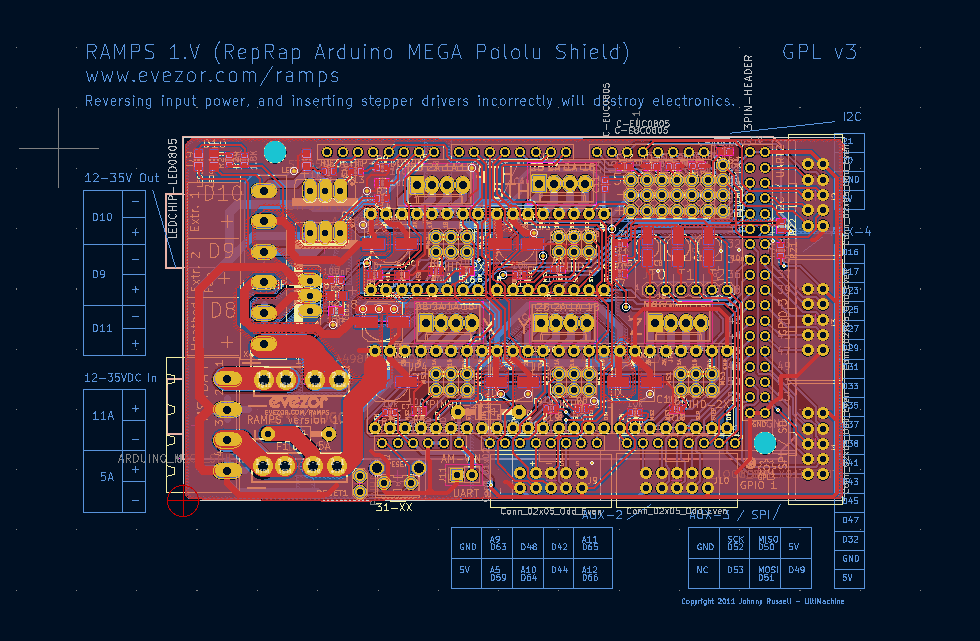
Day 25: evezor_arm_v1_mainboard_v1
10/08/2023 at 01:53 • 0 commentsThis board is based on the RAMPS1.4 Board https://reprap.org/wiki/RAMPS_1.4
The motor connectors have been changed to Molex KK connectors and the extra pins are broken out in the Gadgeteer Standard pinout
Source files can be found here: https://github.com/evezor/evezor_arm_v1_mainboard_V1
![]()
![]()
![]()
![]()
![]()
-
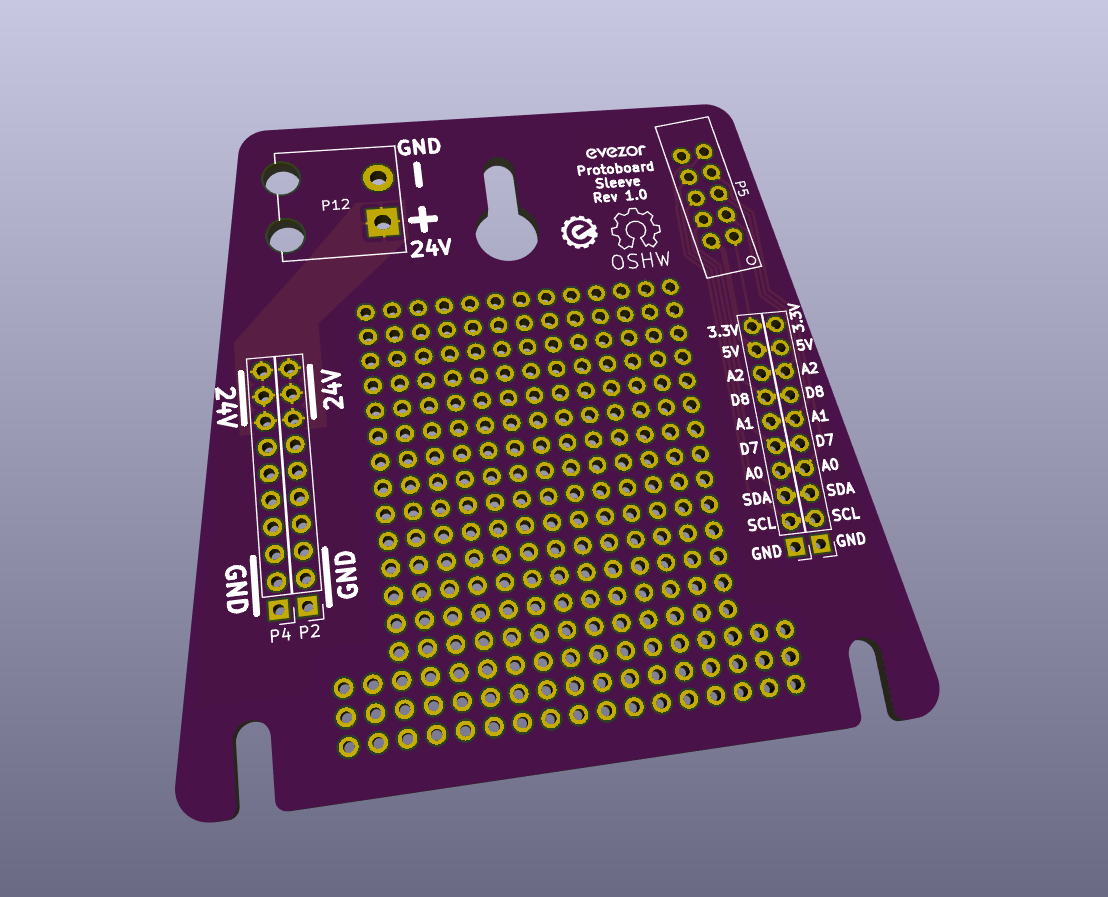
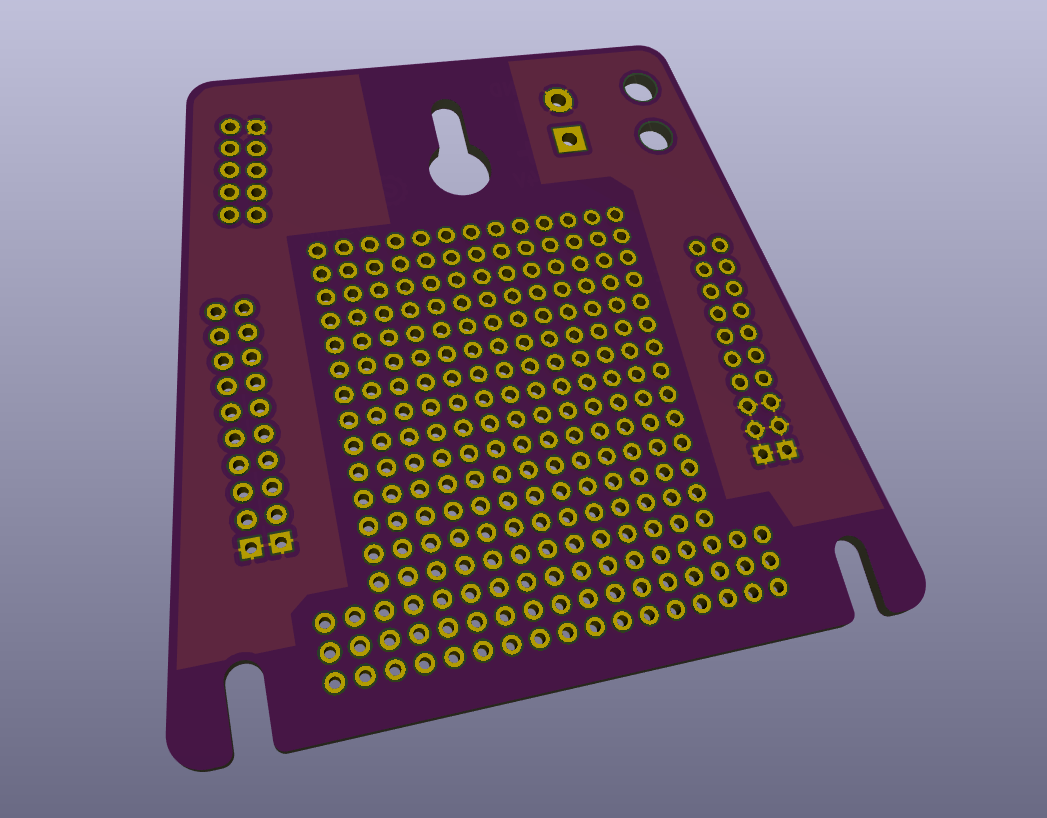
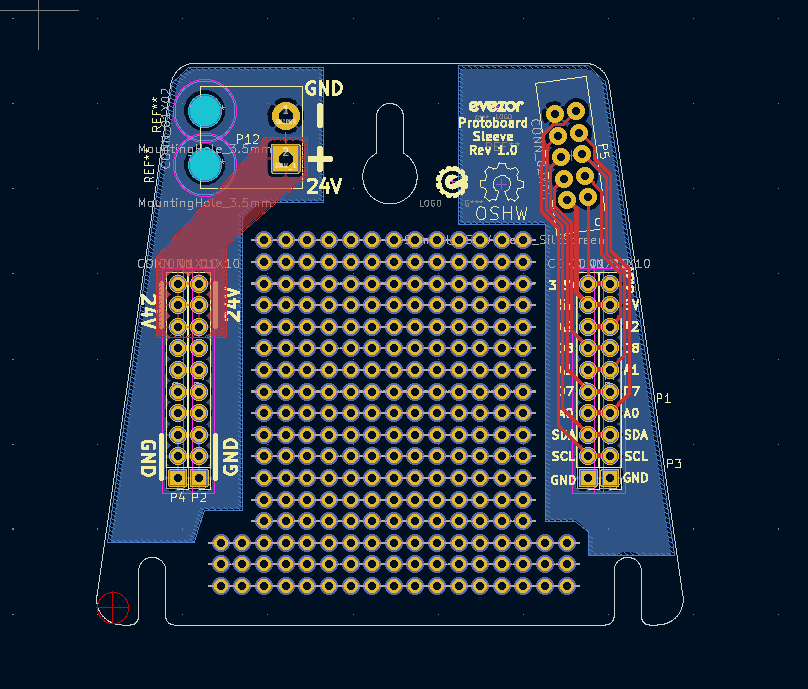
Day 24: evezor_arm_v1_sleeve_protoboard
10/06/2023 at 10:23 • 0 commentsThis board was intended to sit at the elbow of the robotic arm and serve as a prototyping area to create new ciruits. It has a 10 pin IDE port to connect gpio to the sleeve controller board, but this avenue was abandoned as there were many issues keeping things simple.
![]()
![]()
![]()
![]()
Source files can be found here: https://github.com/evezor/evezor_arm_v1_sleeve_protoboard
-
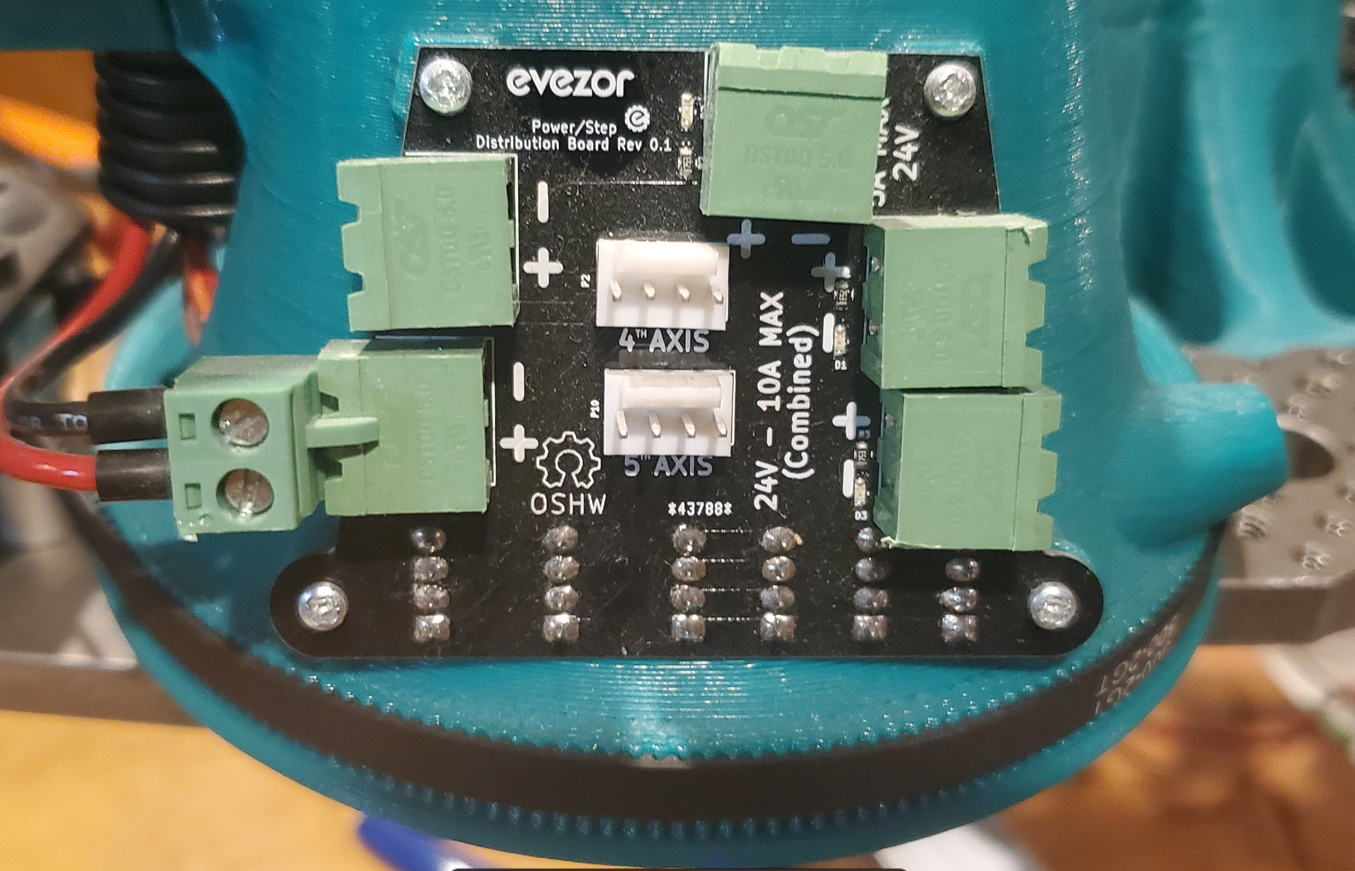
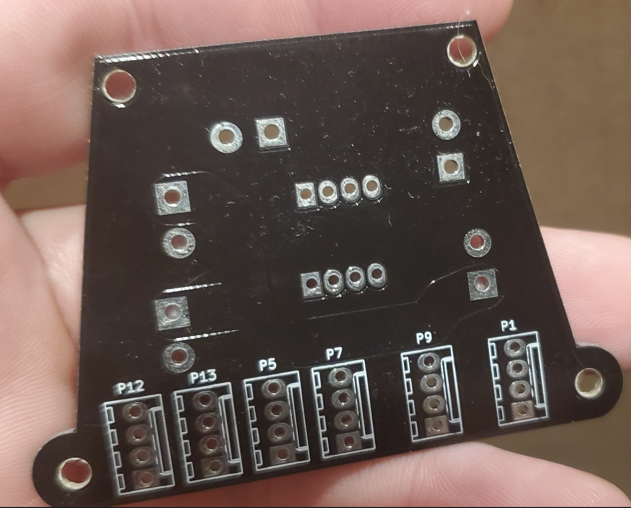
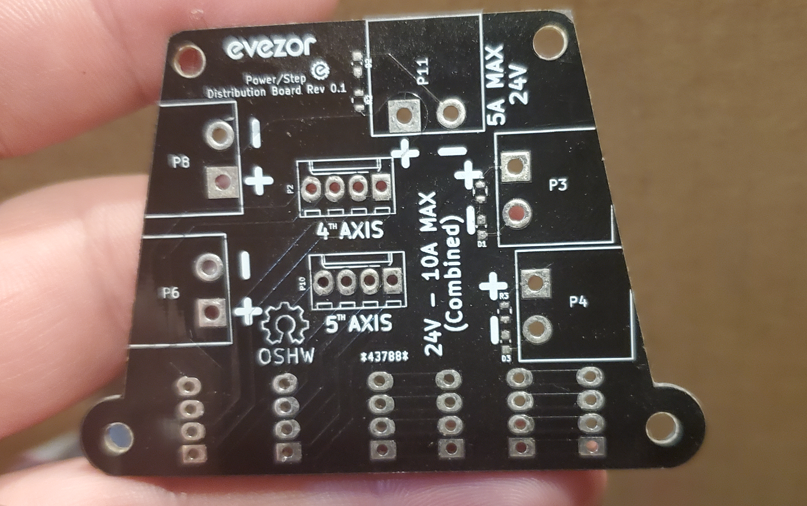
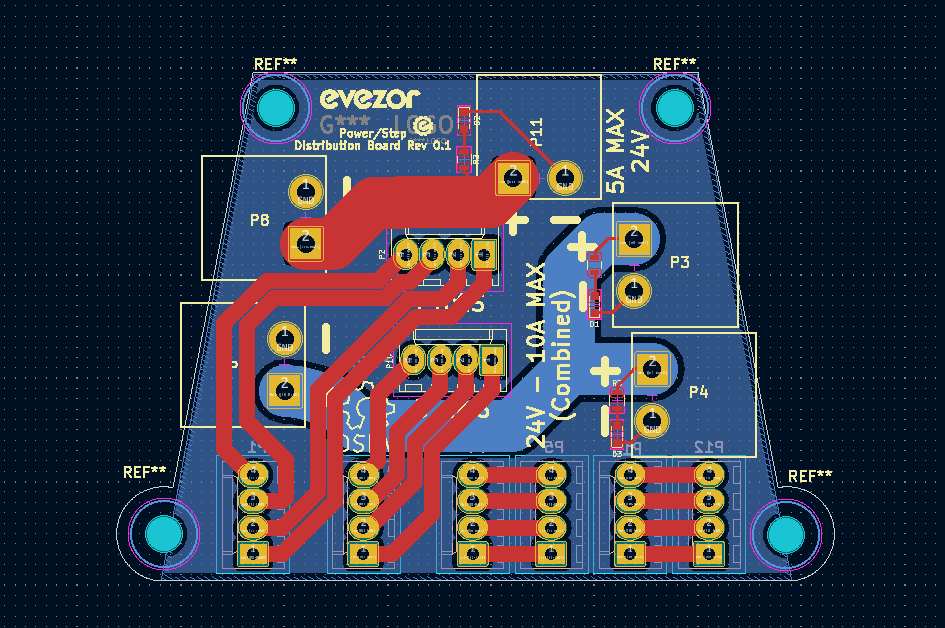
Day 23: evezor_arm_v1_sleeve_powerstep_board
10/03/2023 at 04:12 • 0 commentsThis board was intended to sit at the elbow of the robotic arm and serve as a power distribution point and a place to plug in extra stepper motors when extra axis are wanted.
Source files can be found here: https://github.com/evezor/evezor_arm_v1_sleeve_powerstep_board![]()
![]()
![]()
![]()
-
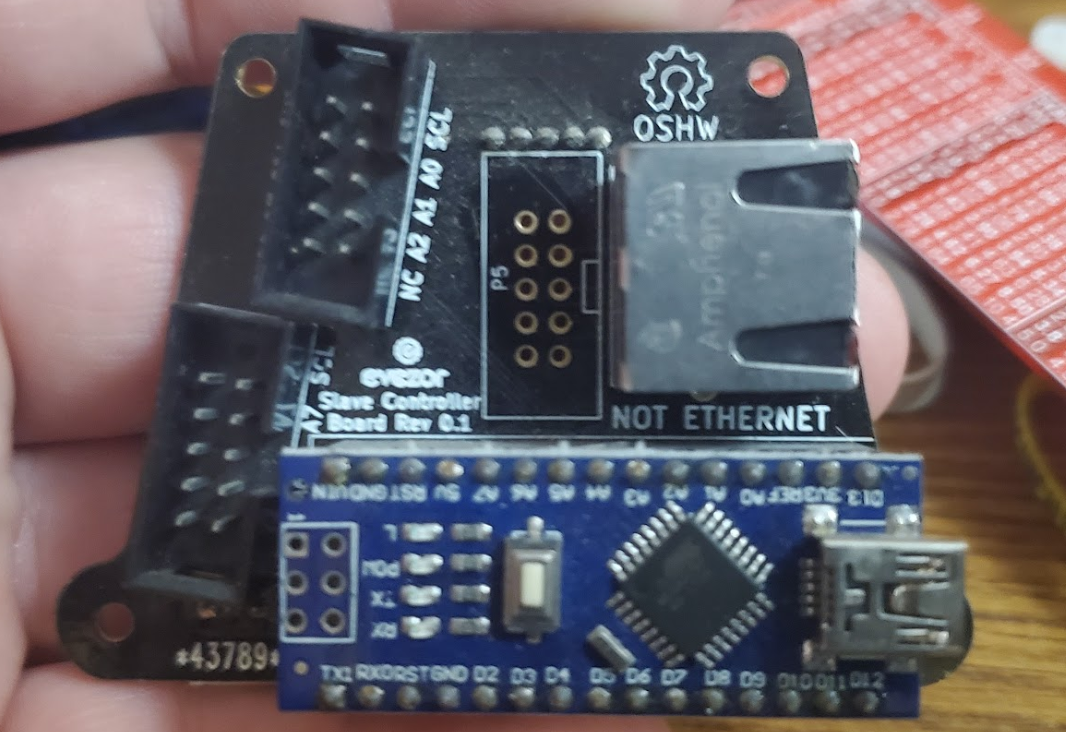
Day 22: evezor_arm_v1_nano_sleeve_board
10/02/2023 at 05:44 • 0 commentsThis board was intended to sit at the elbow of the robotic arm and its primary function was to obtain and smooth readings from the encoders and to drive the neopixel arrays at each joint.
It also featured 2 ide ports that followed the Gadgeteer standard which I found to be a less than satisfactory attempt at creating modular systems. More on these reasonings can be found in some of my other posts.
source files can be found here: https://github.com/evezor/evezor_arm_v1_nano_sleeve_board![]()
![]()
![]()
![]()
-
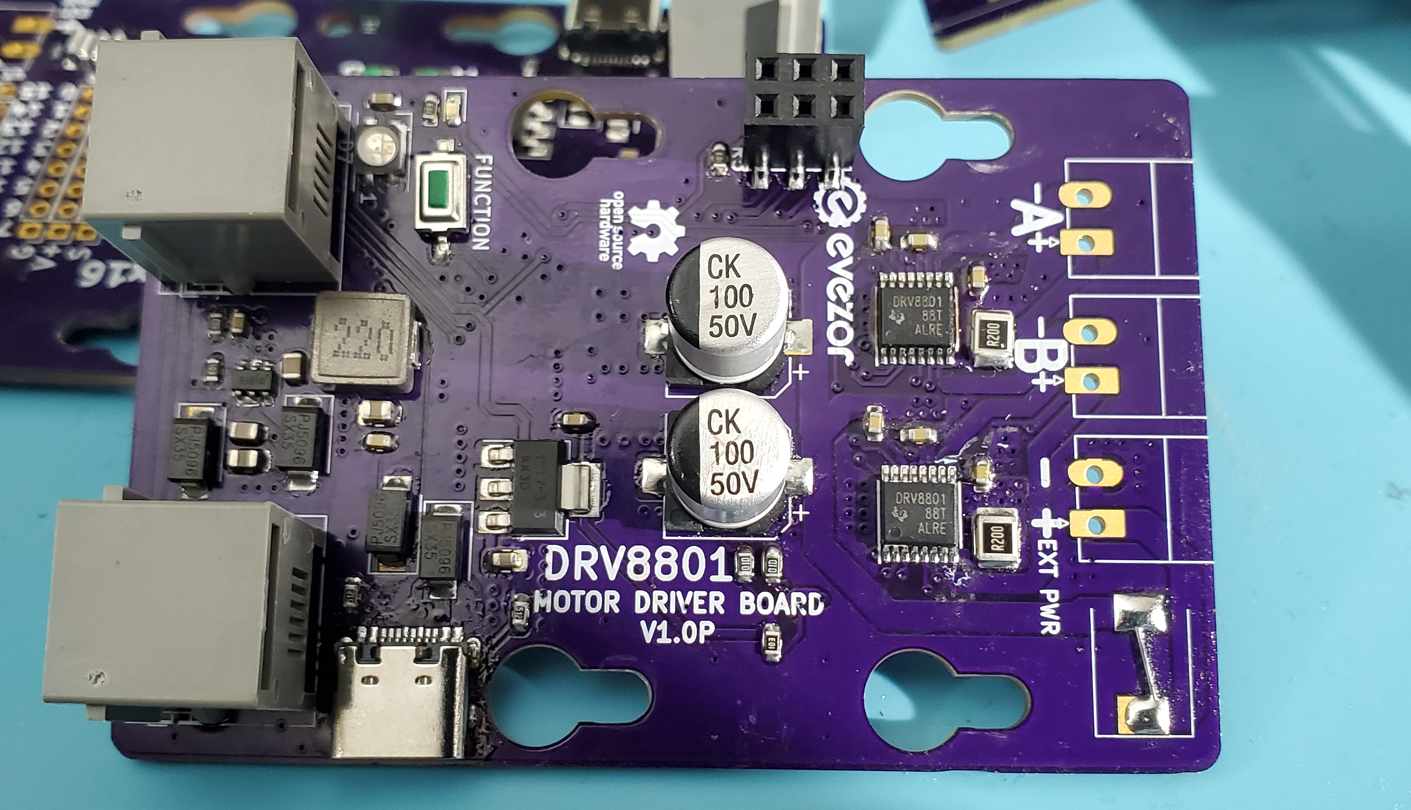
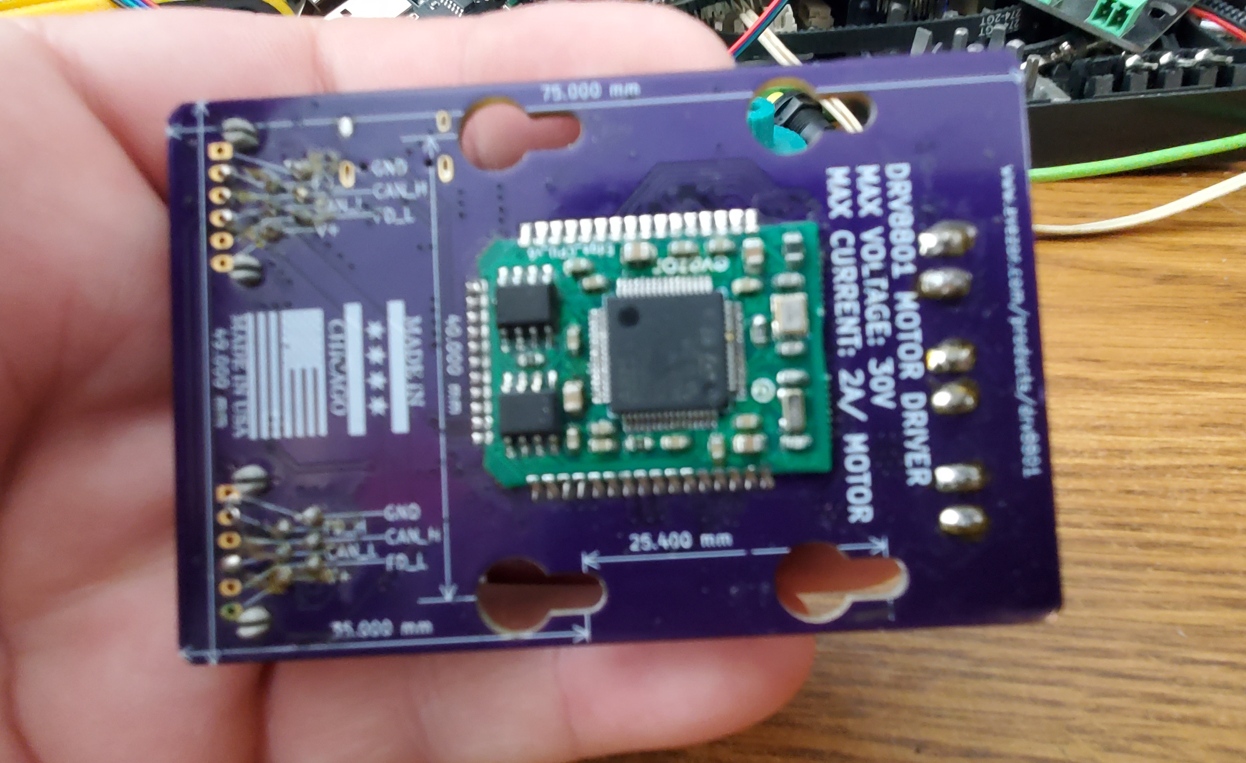
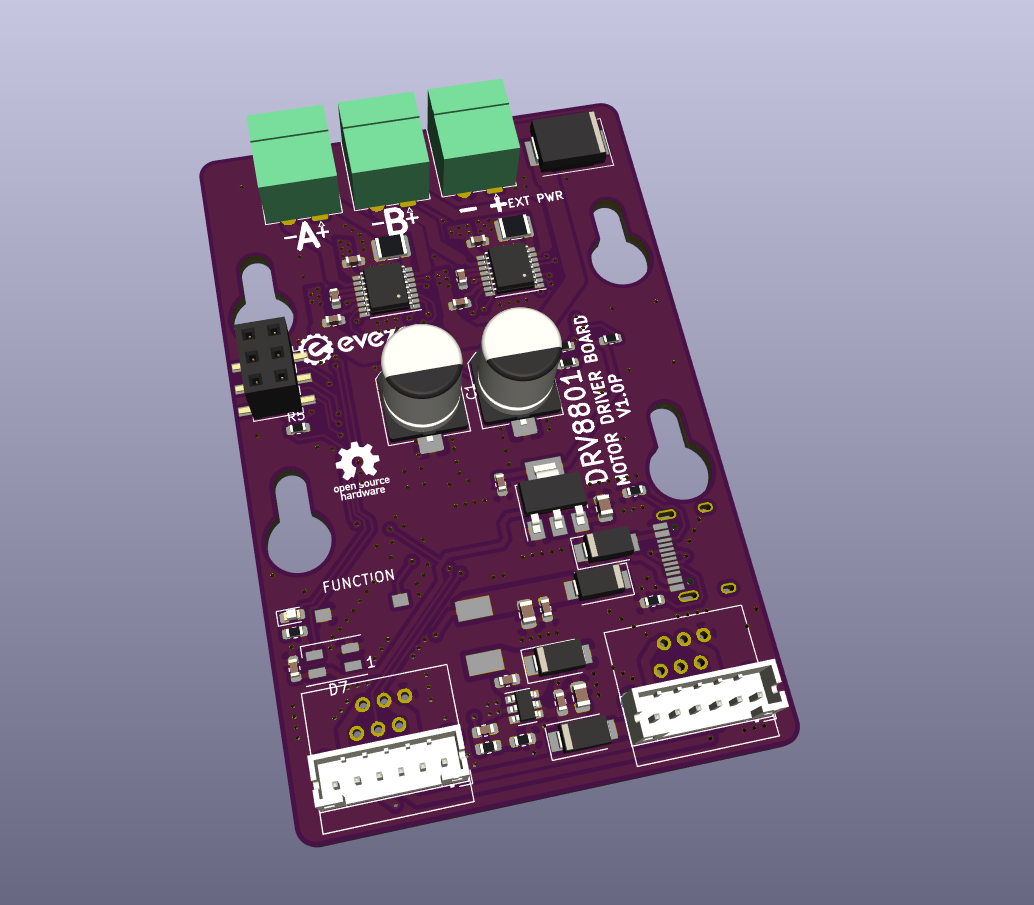
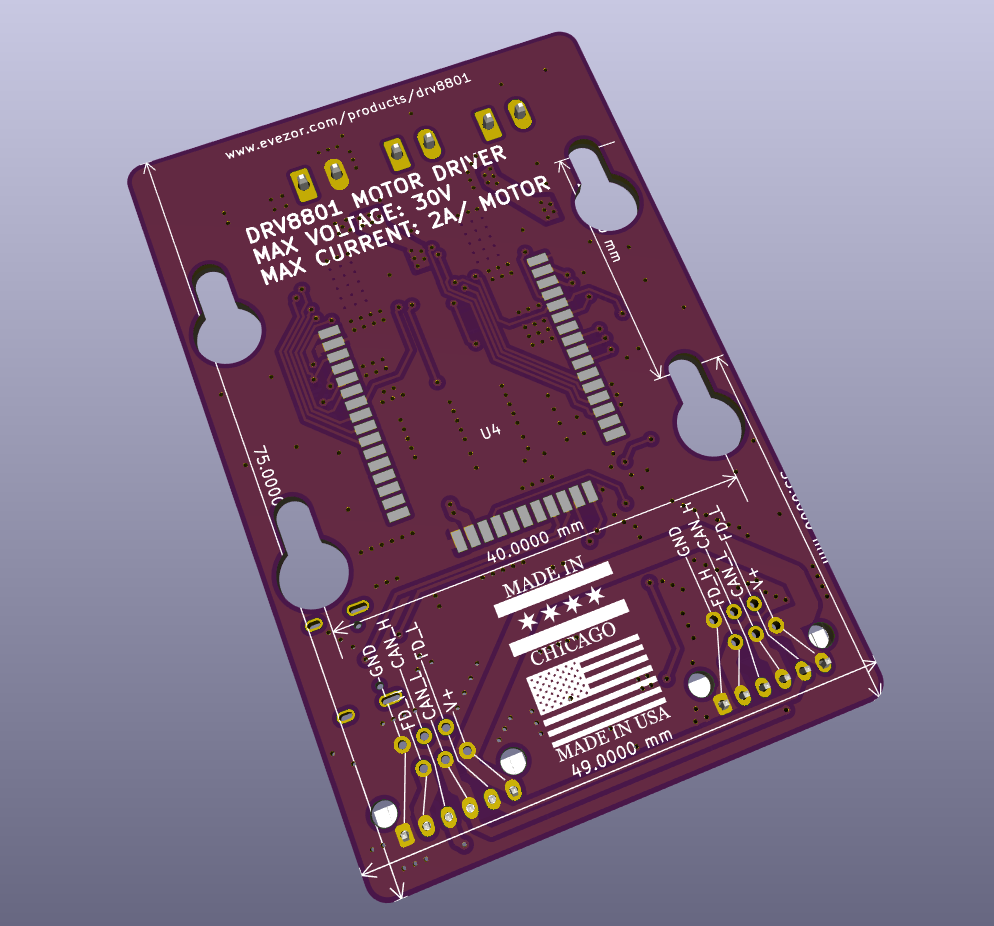
Day 21: Edge Board DRV8801 Motor Driver
10/01/2023 at 02:28 • 0 commentsSource files can be found here: https://github.com/evezor/v0_motor_driver_drv8801
This board uses the Evezor Stamp STMF405 MCU
source: https://github.com/evezor/Evezor-Stamp-STMF405
An edge board with 2, 36 Volt, 2.8A max DRV8801 motor drivers
![]()
![]()
![]()
![]()
![]()
Evezor Robotics and Automation Platform
A Networked set Robotic Arms, Motion platforms, sensors and more. Easily programmed with a drag and drop interface.